Il Rotore
In questa sezione: Angolo di Flappeggio; Angolo di Conicità; Stallo del Rotore; Dissimetria di Portanza; Comando Ciclico; Comando Collettivo; Brandeggio.
Flappeggio
Durante la rotazione il momento di rollio sul rotore principale è causato da una distribuzione asimmetrica del flusso d'aria sulle pale, che viene ridotto dal fatto che la pala può muoversi verso l'alto e verso il basso automaticamente. Il Flappeggio è il movimento angolare di una pala relativamente al piano di attacco o congiunzione al rotore, ed esso avviene al di sopra o al di sotto del piano di rotazione. Per smorzare questo altanelante movimento delle pale si sono escogitati diversi sistemi, come gli smorzatori sui rotori articolari oppure i rotori semiarticolati che hanno una cerniera di flappeggio centrale, oppure i più diffusi e moderni provvisti di cuscinetti elastomerici molto comuni sui rotori rigidi.
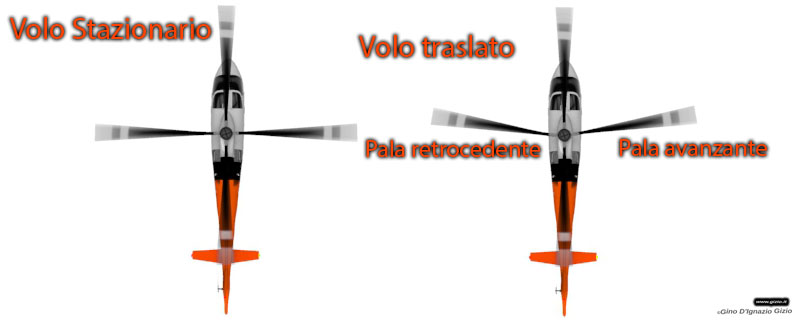
In fase di volo traslato la pala avanzante e quella retrocedente sono in un costante conflitto tra loro, infatti la pala avanzante produce molta più portanza tendendo a sollevarsi verso l'alto - perchè il flusso indotto aumenta su di essa - riducendo l'angolo di attacco, mentre quella retrocedente compie il movimento opposto dovuto ad una situazione di riduzione della portanza o stallo parziale.
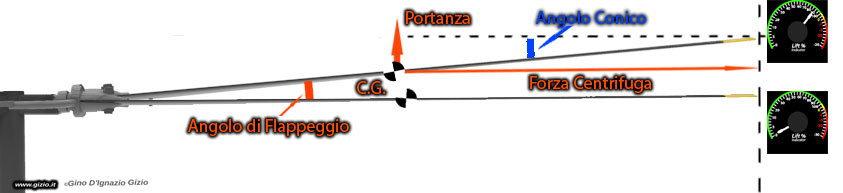
La combinazione di Portanza e Forza Centrifuga che lungo la rivoluzione variano sulla pala, producono un fenomeno che ricorda una sorta di elastico, che provoca oscillazioni in accordo con la naturale frequenza delle pale, uguale ad una per ogni rivoluzione che essa compie.
Questa condizione produce una diseguaglianza della portanza tra la pala avanzante e quella retrocedente che viene a generarsi sul muso e sulla coda piuttosto che al traverso della macchina. Il prodotto di questa condizione produce una constante oscillazione verticale sulle articolazioni del rotore ad una frequenza uguale al numero delle pale del rotore, moltiplicate per il numero dei giri.
Fl=Bn*Rpm (Fl=Flappeggio Bn=Numero delle pale Rpm=Numero giri)
Può
sembrare una spiegazione macchinosa, e forse è troppo generica,
ma non devi preoccuparti, le cose sono molto più semplici di come
appaiono se spiegate nel giusto modo. Se infatti ti è capitato
di vdere arrivare un elicottero bi-pala come un Jet Ranger 206
o meglio uno Huey, un Bell 212 etc,
avrai notato quel suono ritmico simile ad un battipanni che colpisce un
tappeto, ecco quello è il suono del Flappeggio delle pale durante
il volo traslato. A proposito gli Huey erano soprannominati proprio cosi,
cioè il Battipanni, per il tipico suono battente che le pale producevano
durante il volo.
Angolo di flappeggio
I rotore di un elicottero è la parte più importante di questa meravigliosa macchina volante. Si tratta di un complesso sistema assemblato con numerosi componenti che devono resistere a varie forze come torsioni, flessioni, trazioni e compressioni, a seconda della funzione dei singoli elementi che lo compongono. I rotori hanno varie architetture e tipologie e queste hanno attraversato un lungo percorso evolutivo, inoltre essi vengono progettati in contemporanea con l'intera macchina, che avrà un precisio ventaglio di ruoli applicativi per i quali quel determinato tipo di rotore sarà adatto a soddisfarne per le prestazioni richieste.
Il
FLAPPEGGIO è una funzione fondamentale nell’ARTICOLAZIONE
del ROTORE, il rotore di un elicottero infatti non è
una struttura statica o rigida come l’elica di un aeroplano, esso
ha invece un’architettura piuttosto complessa ed estremamente
articolata.
Agli inizi della storia dell’AUTOGIRO, il conte
La Cierva – suo principale inventore
– dovette affrontare uno dei problemi più complessi e per
questo limitativo per le macchine ad ala rotante, soluzione che si dimostrò
presto molto utile per lo sviluppo successivo degli elicotteri. Egli
notò attraverso la sperimentazione su dei modelli in scala, che
gli autogiro non appena superavano una data velocità di traslazione
tendevano a ribaltarsi lateralmente.
La
causa di questo strano comportamento stava nel fatto che le pale erano
rigidamente fissate al rotore cosicchè appena l'aeromobile acquistava
velocità la pala avanzante raggiungeva una velocità maggiore
di quella retrocedente, causando la rotazione laterale della macchina
che si capovolgeva bruscamente. Della
Cierva comprese che le pale non potevano rimanere rigidamente
fisse al rotore ma dovevano in qualche modo essere in grado di potersi
sollevare o abbassare con una escursione limitata, in modo da assorbire
gli effetti della dissimetria di portaza tra la pala avanzante e quella
retrocedente.
Le macchine ad ala rotante sono molto particolari ed il sistema che
costituisce il rotore nelle sue componenti è costantemente sottoposto
a stress meccanico e squilibri aerodinamici molto evidenti, in modo
particolare durante il volo traslato, quando le pale in rotazione si
trovano in una condizione alternante di estrema portanza e poi in uno
stato vicino allo stallo, e questo due volte ad ogni rivoluzione.
La ragione del fenomeno è sopratutto dovuta al fatto che le pale assumono una diversa velocità, a seconda della posizione che raggiungono rispetto al vento relativo durante il moto in avanti. Le pale di una macchina ad ala rotante infatti mantengono tutte la stessa velocità rispetto al vento relativo, solo in una condizione di volo stazionario. Mentre in fase di traslazione, esse sono in una constante conflitto. Una pala durante la fase di rivoluzione può assumere alternativamente una posizione AVANZANTE se si muove nella stessa direzione al moto dell’elicottero, e immediatamente dopo RETROCEDENTE, quando si troverà in una posizione opposta ovvero contraria al vento relativo. Questa condizione sbilanciata si verifica lungo tutta la fase del volo traslato.

Viceversa la pala RETROCEDENTE per la sua posizione si trova in una condizione di velocità pressoché più che dimezzata rispetto al vento relativo, con una drammatica riduzione della portanza in quella zona, cioè la pala è investita dal vento relativo sul dorso e sul bordo di uscita, in breve la pala retrocedente è con il vento alle spalle che dimezza le sue capacità di produrre portanza utile al volo.
Questa condizione si chiama Dissimmetria di Portanza ed è estremamente penalizzante per le macchine ad ala rotante, perché genera un forte squilibro tra le due pale in maniera alternativa tra loro. Nel primo autogiro di La Cierva in seguito ad una serie di ribaltamenti della macchina verso il lato della pala RETROCEDENTE, si riuscì a stabilire che la pala AVANZANTE risultava produrre una quantità di PORTANZA molto maggiore della retrocedente inclinando il rotore nella direzione opposta.
L’idea di La Cierva, fu quella di dotare le pale di una cerniera che avesse un movimento limitato, che permettesse cioè l’oscillazione della pala verso l'alto (Avanzante) o verso il basso (Retrocedente) a seconda della loro posizione rispetto al vento relativo, prodotto dalla velocità di traslazione dell'aeromobile in modo da adattare il sistema automaticamente al fenomeno della dissimetria di portanza. Questo meccanismo si dimostrò in grado di compensare questo squilibrio evitando finalmente il ribaltamento della macchina.

Il movimento di FLAPPEGGIO è dato dunque dal fatto che la PORTANZA che si genera nella zona avanzante tende ad inclinare verso l’alto la pala. La pala come è stato detto nel capitolo precedente possiede una propria elasticità strutturale, questo fenomeno provoca un momento flettente, ed è per fare fronte a queste sollecitazioni che le vibrazioni risultanti stressano duramente la struttura delle pale. E' per questo che sin dall’inizio è stato necessario dotare la pala di una cerniera che le consentisse un movimento se pur limitato verticalmente lungo il piano orizzontale. Questo meccanismo si chiama CERNIERA DI FLAPPEGGIO.
Durante la fase di FLAPPEGGIO la PALA produce un angolo formato dal piano PERPENDICOLARE all’asse del MAST con l’ASSE LONGITUDINALE della PALA. In realtà la descrizione che la pala fa del disco virtuale non è stabile poichè quando essa si solleva per effetto della combinazione tra Forza Centrifuga e Portanza viene a formarsi una sorta di cono. Il piano di rotazione è in effetti inclinato verso l'alto e non perfettamente piatto. Per cui il disco rotore è descritto dal raggio (pala) che ruota attorno al mast (centro di rotazione) e la parte estrema della pala (Tip Pat Plane) che descrive un cerchio con il suo diametro massimo alla sua estremità. La rotazione in queste condizioni produce come effetto geometrico visibile il fenomeno della CONICITA’ del rotore, questa deformazione è particolarmente evidente in volo STAZIONARIO.
Vi sono sostanzialmente tre sistemi che assolvono perfettamente allo smorzamento del flappeggio, nell’esempio riportati nelle animazioni. Quello più semplice è chiamato semiarticolato, ma sarebbe meglio chiamarlo con il suo termine inglese poichè è sicuramente il più preciso e cioè Tilting Rotor (Rotore oscillante) che è sempre presente nei rotori bipala. Questi dispositivi utilizzano una sola cerniera in comune mediante un perno al centro del mast, che assicura il bilanciamento del rotore (animazione in alto). Il meccanismo è molto semplice e fa in modo che le pale vengano sollevate alternativamente, in modo tale da alzare la pala avanzante abbassando contemporaneamente quella retrocedente senza che la macchina venga ribaltata lateralmente. Questa tipologia è conosciuta con il nome di rotore SEMIARTICOLATO, esso è tipico di elicotteri come il Bell Jetranger, lo Huey, ed i Robinson R22, R44 l'R66.
Il secondo meccanismo è piuttosto diffuso su macchine multipala, sebbene questa tipologia più complessa è piuttosto diffusa su elicotteri pesanti. Questo rotore ha diversi tipi di smorzatori incluso quello di flappeggio, ed è conosciuto come ROTORE ARTICOLATO.
Il terzo metodo di smorzamento del flappeggio è come vedremo prodotto dalla struttura della pala stessa e grazie anche all'adozione di particolari smorzatori elastomerici di vario tipo, questo sistema infatti offre a parità di robustezza uguali proprietà elastiche, tali da riuscire ad assorbire con successo il fenomeno del flappeggio, cosi pure del Brandeggio che analizzeremo in seguito. Questo ultimo tipo di rotore è conosciuto con il nome di ROTORE RIGIDO. In questa sezione saranno trattati nei dettagli questi tre sistemi di propulsione elicotteristica.
Angolo di conicità
Durante la rotazione le pale vengono stirate dalla forza Centrifuga, esse sono molto leggere e questo riduce la forza di trazione che esercitano sulle articolazioni a cui sono assicurate. Se osservi un elicottero da fermo, noterai da subito che le pale non sembrano possedere una rassicurante rigidità, anzi appaiono piuttosto appesantite inarcuandosi leggermente verso il basso. Ma non appena il rotore comincia a girare sempre più velocemente fino a raggiungere i valori operativi di volo quelle stesse pale acquisiscono una livello di rigidità elevatissimo.
Durante
la rotazione la Portanza comincia a generarsi e la pala
inizia a sollevarsi ma continua ad essere stirata e tesa verso l'esterno,
questa combinazione di forze tra Portanza e forza Centrifuga,
produce una sorta di cono, questa geometria si forma tra le articolazioni
delle pale ed il circuito di rotazione periferico
(Tip Path Plane) o TPP. Maggiore è la
massa della pala, tanto più in basso sarà il TPP.
La spinta solleva la pala verso l'alto per mezzo della Portanza
che si genera, mentre il suo peso produce la forza Centrifuga
che la tira verso l'esterno, naturalmente se una delle pale ha un peso
differente dalle altre la forza Centrifuga sarà diversa su di essa
e questo causerà uno sbilanciamento del rotore che produrrà
vibrazioni di tipo orizzontale, come abbiamo già visto nel capitolo
precedente. All'aumento dell'angolo di conicità il diametro del
rotore si riduce perchè il raggio di esso è più corto
e dunque si avrà una Portanza inferiore, infatti un angolo di 5°
o perfino di 10° può ridurre rispetivamente
la portanza sul rotore tra lo 0,3% fino al 3%.
L’ANGOLO DI CONICITA’ varia con la variazione dell'angolo di attacco delle pale e del peso dell'aeromobile, a seconda delle condizioni di carico. Maggiore è l'angolo di Conicità tanto più il Centro di Gravità della pala tende a muoversi verso l'interno del rotore.
Altrettanto importante è la velocità di traslazione che influenza il grado di conicità in modo piuttosto rilevante. Dato che la FORZA CENTRIFUGA ha un ordine di grandezza di 20/25 volte maggiore di quella della PORTANZA, la sua conicità risulta all’incirca 1/20; 1/25 in proporzione. L'ANGOLO DI CONICITA' è in generale corrispondente a 2°, 3°. Bisogna anche considerare che l'aumento dell'angolo di attacco significa un aumento consequenziale della resistenza e della potenza richiesta, ed una volta che si raggiunge la massima potenza disponibile il rotore comincia a rallentare e l'angolo di attacco risulta eccessivo.
In questa situazione il cono rotorico aumenta considerevolmente e può raggiungere uno stato critico pericolosissimo, perchè a quel punto la forza centrifuga non è sufficiente per poter mantenere le pale ben stirate e tese da sostenere il peso della macchina e del suo contenuto. L'aumento eccessivo dell'angolo di incidenza delle pale è chiamato Over-Pitching e questo fenomeno ha una particolare influenza su macchine provviste di motore alternativo. Nei motori a turbina il complesso trasmissione-motore è più compatto, più leggero e più potente e questo consente al pilota di disporre di maggiore potenza, diversamente avviene se si dispone di un motore a pistoni. Se si riduce l'incidenza del Collettivo, si riduce la resistenza e quindi la potenza necessaria, e se ci si trova in direttiva di atterraggio sarà meglio non tentare di effettuare un hovering sopratutto se ci si trova in una situazione prossima all'over-pitching, perchè l'elicottero potrebbe non essere in grado di volare a punto fisso, condizione che può avvenire facilmente in alta montagna.
A tal punto durante il mio addestramento per conseguire la licenza commerciale FAA nel lontano 1991, durante un volo dalla costa di Newport Beach (CA) su verso il Big Bear, una catena montos che sovrasta la valle delle Clifornia meridionale io ed il mio istruttore abbiamo dovuto eseguire un atterraggio ed un decollo strisciato proprio perchè la potenza per effettuare l'hovering non era sufficiente e si sarebbe incappati nell'over piching.
Quindi
la CONICITA’ deriva dall’azione combinata
tra la PORTANZA e la FORZA CENTRIFUGA;
questo fenomeno geometrico è conosciuto come CONO ROTORICO.
L’ASSE DEL CONO è detto anche ASSE
VIRTUALE.
L’ASSE VIRTUALE ha due differenti inclinazioni
a seconda che l’elicottero si trovi in volo TRASLATO
o volo STAZIONARIO, infatti esso in quanto "virtuale"
non coincide sempre con l'asse del mast.

In volo traslato l’ASSE VIRTUALE tende ad inclinarsi in avanti, nel volo STAZIONARIO esso coincide con l’ASSE VERTICALE. Affiche l’elicottero possa levarsi in volo, spingendo una massa d’aria in peso equivalente al peso della macchina per ogni dato secondo di volo, è necessario aumentare l’angolo di incidenza delle pale del rotore. Il rotore come si è già detto è una struttura molto complessa, ogni pala infatti è fissata ad una serie di cerniere, aventi una funzione strutturale precisa; come già visto per il FLAPPEGGIO.
Un elemento nuovo è la Cerniera di Cambio Passo, che permette la modifica dell’angolo di incidenza di ogni singola pala, che come vedremo può variare sia in maniera COLLETTIVA - cioè tutte le pale assumono lo stesso angolo di incidenza - sia in maniera CICLICA - quando invece esse assumono un angolo diverso tra loro - a seconda della propria posizione durante la rivoluzione, e qui le cose si fanno ancora più interessanti.

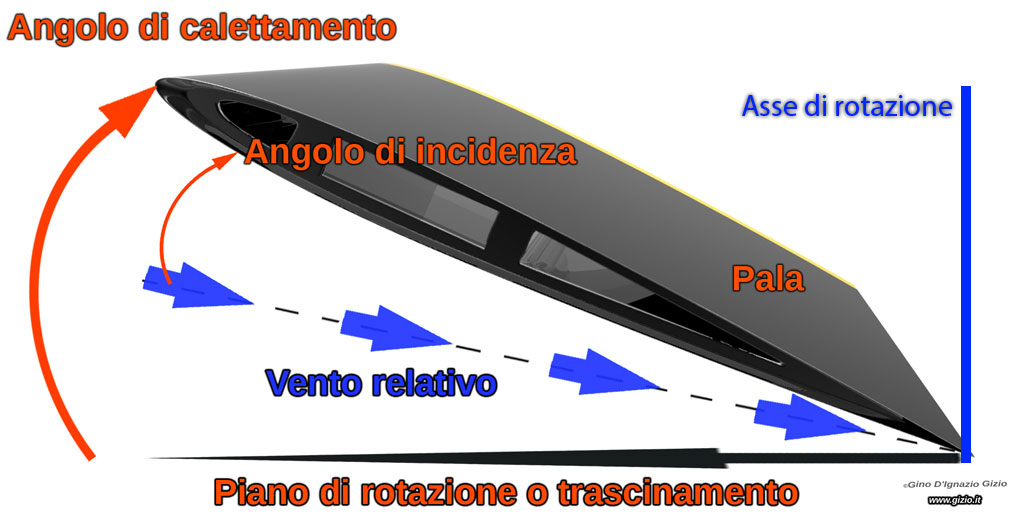
Angolo di Calettamento
Durante
la rivoluzione del ROTORE il profilo alare di una pala
può assumere diversi angoli. In volo stazionario si ha una situazione
in cui l’ANGOLO DI CALETTAMENTO o di PASSO
coincide con quello di INCIDENZA, e con l'ANGOLO
DI ATTACCO in quanto il VENTO RELATIVO è
esattamente sul piano di rotazione, mentre in VOLO TRASLATO
le pale si trovano a formare un angolo diverso per ogni singola posizione
rispetto al vento relativo, e con esso anche
rispetto all’ANGOLO DI CALETTAMENTO o PASSO.
Durante la fase di SALITA, oltre alla VELOCITA’
di ROTAZIONE delle pale che deve rimanere constante - poiché
esse devono assumere una struttura rigida e tesa grazie alla forza centrifuga
- le pale sono sottoposte anche ad una velocità verticale, per
l'appunto la VELOCITA’ di SALITA.
In questo caso l’ANGOLO DI PASSO non è
uguale a quello di INCIDENZA, ma risulterà maggiore
di quest’ultimo poiché l’ANGOLO DI INCIDENZA
è l’angolo formato dalla CORDA e dal PIANO
DI ROTAZIONE della pala che non è più vincolato
all'asse perpendicolare del mast, ma solo alla traiettoria che la pala
compie lungo il processo di rivoluzione, che descrive un piano di rotazione.
In fase di SALITA, oltre alla VELOCITA’ di ROTAZIONE del rotore - che deve rimanere constante - si ha anche una VELOCITA’ verticale o di SALITA.
In questa situazione l’ANGOLO DI CALETTAMENTO o PASSO è un angolo tecnicamente rigido, rappresentato dall'angolo descritto dalla Corda ed il PIANO DI ROTAZIONE che deve essere perfettamente perpendicolare al mast o asse di rotazione. Tuttavia poichè si tratta in teoria di un angolo di per se rigido - infatti è generalmente utilizzato come parametro per le eliche piuttosto che per i rotori di elicotteri - esso coincide nella maggior parte delle occasioni con l’ANGOLO DI INCIDENZA. Si può dunque anche stabilire che l’ANGOLO DI CALETTAMENTO è l’angolo compreso tra la CORDA e la traiettoria descritta dalla VELOCITA’ PERIFERICA della pala, che si muove sul piano di rotazione SEMPRE perfettamente perpendicolare al mast.
Per fare qualche esempio: In volo stazionario in assenza di vento i tre angoli (Incidenza; Attacco; Calettamento) coincidono, poichè il vento relativo (Angolo di Attacco) sorge sullo stesso piano di rotazione della pala (Angolo di Incidenza) che a sua volta è descritto con un angolo perfettamente perpendicolare rispetto al mast (Angolo di Calettamento).
In volo traslato invece le cose cambiano molto, poichè l'Angolo di Incidenza, l'Angolo di Attacco e l'Angolo di Calettamento non conicidono più tra loro ed hanno anzi un valore diverso. L'angolo di Attacco può variare a seconda che esso si misuri sulla pala avanzante - dove risulterà maggiore - rispetto allo stesso che si forma sulla pala retrocedente - dove è chiaramente inferiore - da qui la Dissimetria di Portanza.
L'angolo di Incidenza sul piano di rotazione è anche esso diverso, poichè il flappeggio solleva una pala rispetto all'altra modificando l'angolo che esse descrivono sul piano di rotazione, che risulta infatti inclinato in avanti per effetto dell'azione del ciclico.
Infine l'angolo di calettamento deve risultare identico sulle pale in teoria, poichè esso decrive l'angolo formato dalla corda alare ed il piano di rotazione perpendicolare al mast, ma poichè le pale di un elicottero non sono per loro natura super rigide come quelle di un elica esso non coincide quasi mai con gli altri due angoli descritti, sopratutto in volo traslato.
Stallo del rotore
Impostando RATEI DI SALITA troppo rapidi o RATEI DI DISCESA troppo ripidi si va incontro al distacco dei FILETTI FLUIDI dalle PALE, con conseguente entrata in STALLO del DISCO ROTORE, ed una successiva e pericolosa perdita di QUOTA. In questa fase si percepiscono oltre a vibrazioni, anche delle importanti variazioni di assetto della macchina. Naturalmente lo STALLO DEL ROTORE diventa critico solo in questa condizione di volo. Nel volo TRASLATO lo stallo può essere presente ma in maniera irrilevante, anche perchè come già detto è una condizione cronica della pala retrocedente, oltretutto vi è una porzione di stallo permanente in gran parte dell'area di connessione della pala con il MAST e le articolazioni, perchè l’angolo di incidenza in quel punto - grazie all’idea dello svergolamento - è maggiore alla radice della pala, cioè in prossimità della meccanica. Infine un numero rilevante di componenti non proprio aerodinamiche come bulloni, braccetti e l'insieme del sistema di articolazioni, creano proprio in quella zona la maggior parte delle turbolenze indesiderate. Dunque la somma dei fattori degrada sensibilmente la qualità della Portanza.

Dissimetria di portanza
La turbolenza del rotore genera anche la Resistenza di Interferenza che riduce le prestazioni in maniera piuttosto importante. Da alcuni anni le industrie del settore elicotteristico stanno sviluppando dei rotori particolarmente efficienti lavorando sull'aerodinamica delle articolazioni, che sembra aver ridotto notevolmente questo svantaggioso effetto. Uno degli esempi più recenti è lo sviluppo del rotore coassiale controrotante rigido impiegato sul Sikorsky S97 in cui la meccanica è completamente coperta da gusci che hanno un profilo estremamente aerodinamico. Oggi uno dei rotori che produce maggiore resistenza di interferenza è quello del KA32, per la sua estrema complessità, dovuta ai due rotori sovrapposti e le numerose articolazioni esposte che lo compongono.
Abbiamo fin'ora chiarito il ruolo delle cerniere di flappeggio (Rotori articolati e semiarticolati) che compensano quello strano fenomeno accennato sopra chiamato DISSIMETRIA DI PORTANZA. Guardiamo più da vicino questo effetto aerodinamico, che coinvolge l'intero sistema del rotore e che rappresenta un ulteriore ostacolo alla velocità massima raggiungibile dagli elicotteri.
Se osservassi un elicottero venire verso di te; noteresti che il rotore non descrive un piano perfettamente orizzontale ma leggermente inclinato da un lato, se si fa poi caso al senso di rotazione delle pale ti accorgerai che la pala avanzante - quella che ci viene incontro - è più alta, mentre la retrocedente - quella che si allontana - è più bassa. Questo è il modo attraverso il quale si può osservare chiaramente il fenomeno della Dissimmetria di portanza, ed è molto evidente nei rotori Semiarticolati, come quello del JetRanger, o dei Robinson.
Sulla PALA RETROCEDENTE si forma un area di correnti aerodinamiche chiamata ZONA DI FLUSSO INVERSO. A questa area si aggiunge una zona di stallo dovuta agli elementi meccanici del rotore, cosi come sopra descritto. Ma gioca un ruolo sconveniente anche l'elevato angolo di incidenza proprio in quel punto della pala Retrocedente.
Il
FLUSSO INVERSO è dunque un’area della
PALA RETROCEDENTE dove invece della PORTANZA
si genera una DEPORTANZA poichè la pala attacca
il VENTO RELATIVO sul BORDO DI USCITA
e con un angolo negativo.
La ZONA DI STALLO alle estremità della PALA
retrocedente si forma solo a velocità elevate di TRASLAZIONE,
questa aumenta in larghezza e si sposta verso la parte periferica del
ROTORE con l'aumentare della velocità. Il CENTRO
AERODINAMICO DI PRESSIONE si muove verso la periferia della
PALA man mano che aumenta la velocità di TRASLAZIONE.
Mentre sulla pala Avanzante le cose sono esattamente
opposte ed anzi la sua velocità rispetto al vento relativo sarà
molto più elevata, poichè essa verrà a sommarsi
alla velocità dell'elicottero in traslazione, ed abbiamo già
visto quanto la velocità del suono sia un limite invalicabile
per una pala, specie nella sua area periferica, dove raggiunge valori
molto elevati che non possono essere superati. Da questo punto in poi
si percepisce sempre più con chiarezza la ragione per cui un
elicottero sia sottoposto ad una notevole limitazione di velocità,
ma conservi anche delle proprie caratteristiche, quelle di una macchina
estremamente versatile ed affascinante.

Si può vedere chiaramente come la pala avanzante si sollevi abbassando sul lato opposto quella retrocedente, mediante la comune cerniera di flappeggio (Rotore semiarticolato), in modo da evitare il ribaltamento dell'elicottero che avverrebbe proprio per l'aumento della portanza sul lato destro (pala avanzante) e quindi automaticamente la diminuzione conseguente a sinistra (pala retrocedente) (punto di vista del pilota). L'elicottero in figura è una parziale riproduzione di un Bell Jet Ranger, nel quale la direzione di rivoluzione del rotore è antioraria, e questo fa della pala alla destra del pilota quella avanzante. Nelle macchine francesi o russe la rivoluzione è oraria, e la pala avanzante è alla sinistra del pilota.
Durante il volo traslato, la velocità della pala avanzante è maggiore di quella retrocedente. Infatti ho già specificato numerose volte che alla pala avanzante si aggiunge la velocità di straslazione dell'elicottero, essa dunque produce maggiore portanza. La Portanza varia con il quadrato della velocità (lift=Speed²). La Dissimetria di Portanza in breve rappresenta la differenza di portanza che si verifica in volo traslato, tra la pala avanzante e quella retrocedente. Per compensare questo squilibrio è dunque necessario permettere ad entrambe le pale di potersi muovere a seconda della loro posizione - durante la rivoluzione - verso l'alto o verso il basso, cioè il Flappeggio.
Purtroppo le cose non terminano solo con una pala che sale e l'altra che scende sul lato opposto, anzi. Abbiamo detto che durante la rotazione le pale descrivono un disco virtuale, che rappresenta una sorta di ala. Questa ala circolare produce portanza ma l'omogeneità di essa viene ben consolidata in volo stazionario, quando tutte le pale producono la stessa identica quantità di portanza, esse infatti si muovono con identica velocità angolare. Ma abbiamo visto però che in volo tralato la dissimetria di portanza cambia le cose sulle pale, e quindi sull'area che esse descrivono in rotazione. Nel (Video) (Rotazione in senso orario) si può osservare come la pala del MilMi8 si sollevi e si abbassi in volo traslato a seconda che essa raggiunga una posizione avanzante o retrocedente.
In volo traslato infatti la portanza che si genera sul disco rotore è estremamente disomogenea, e varia con il variare della velocità di traslazione. Sulla sua superficie virtuale si generano aree dove la portanza è molto elevata, ed altre aree dove essa è assente, anzi si produce una relativa area di stallo.
Di sotto si può vedere come sul disco rotore si formino varie zone di Portanza, di Stallo ed addirittura di Deportanza. La zona più evidente è quella relativa alla Portanza che tutto sommato - e per fortuna - rappresenta la maggior parte della "superficie" del disco rotore. Poi vi è una zona di Flusso Inverso, dove si forma un'area di deportanza proprio sulla pala Retrocedente, e quindi una zona di Stallo in prossimità della radice della pala retrocedente. Maggiore è la velocità dell'elicottero tanto maggiore sarà l'estensione delle aree di Flusso Inverso e di Stallo.

Dunque è il PENDOLAMENTO DEL VENTO RELATIVO - cioè l'effetto che esso ha sulla posizione della singola pala che si alterna in continuazione tra Avanzante e Retrocedente - la causa principale per la quale un elicottero che adottasse un rotore completamente rigido - o almeno senza componenti flessibili all'attacco della pala con le articolazioni - non sarebbe in grado di traslare senza essere soggetto ad una azione di ribaltamento, e quando si supera la VNE (Velocity Never Exceed) si cominceranno a notare forti vibrazioni e problemi di governabiltà dell'elicottero.
Tuttavia oggi è possibile spingersi oltre in termini di velocità e controllo del rotore, grazie ai sistemi che Sikorsky ha sperimentato sull'X2 e presto adotterà anche sul S97. Il rotore di cui sono dotate entrambe le macchine è di tipo rigido con architettura coassiale.
La macchina è gestita da un sistema digitale che regola l'angolo d'attacco di ogni singola pala - sopratutto in modo ciclico - fino a ridurre l'angolo di attacco vicino allo zero in prossimità di velocità molto elevate. In altre parole si tratta di un rotore dinamico, in grado di autoregolarsi in base alla velocità di traslazione, fino a volare quasi completamente in autorotazione. Le pale del rotore principale assumono un angolo minimo, poichè il disco rotore si comporta come un ala circolare, sostenendo la macchina senza problemi tranne che per le vibrazioni che si generano ad elevate velocità, ma a questo provvede un sistema di smorzamento ad assorbirle con efficacia.
Bisogna aggiungere però che l'elevata velocità di traslazione è possibile grazie ad un elica spingente che riduce moltissimo il carico del rotore principale, il quale è dotato di pale progettate per le alte velocità aventi una pianta molto singolare. E' probabile che i rotori coassiali rigidi Sikorsky diventino uno standard, infatti tra i miei progetti ho considerato questa possibilità sviluppando qualche modello virtuale in tal senso con un paio di elicotteri che adottano questo sistema (GS106-GS211). Rimane tuttavia il fatto che un rotore non potrà mai superare un limite importante, che è quello causato della dissimmetria di portanza delle pale e la velocità del suono che fustiga la zona periferica del rotore; fattori entrambi estremamente penalizzanti per questa macchina straordinaria.

Sulla pala retrocedente avviene il fenomeno del Flusso Inverso, e le sue dimensioni del fenomeno aumentano con l'aumentare della velocità. Il motivo per il quale la pala Retrocedente viene definita cosi, è dovuto al fatto che essa retrocede rispetto alla direzione di volo e nella sua zona periferica si produce lo stallo, quest'area di stallo si genera in periferia con l'aumentare della velocità, in quanto la pala si abbassa per cercare di compensare la perdita di portanza e la zona di stallo comincia a muoversi verso l'interno della pala, ampliando la superficie di disturbo. Le pale rastremmate possono ridurre sensibilmente questo fenomeno. Generalmente lo stallo della pala retrocedente si forma ad un elevato angolo di incidenza sul collettivo, od anche quando l'elicottero ha una massa molto elevata, ad elevata altitudine, con temperatura ed umidità elevate, insomma in ogni circostanza nella quale la pala non riesce più a produrre Portanza per inefficienza aerodinamica.
I sintomi di questa situazione critica sono ruvidità nei comandi; basse frequenze; vibrazioni, che corrispondono al numero della pale. Il muso dell'elicottero comincerà a sollevarsi con un evidente rollio su entrambi i lati dell'elicottero, in modo particolare con una tendente rotazione verso il lato corrispondente alla pala retrocedente.
Il massimo angolo di incidenza che si ha lungo la circonferenza del rotore, corrisponde alla posizione della pala quando essa è a 270°, mentre il valore più basso è a 90° o poco più, sul lato opposto (Rotore antiorario). Quindi in buona sostanza sono le pale che si trovano a 0° ed a 180° cioè quelle sul muso e sulla coda della macchina, che sostengono l'aeromobile in volo. E' bene tenere presente che le variazioni di stallo sulle pale di un elicottero non avvengono allo stesso modo di quelle che si formano su di un ala di un aereoplano, ma poichè esse sono saldamente fissate al sistema del rotore e sono sottoposte ad accellerazione angolare costante, la loro condizione si alterna tra portanza e stallo per ogni rivoluzione che ogni singola pala compie.
Per tirarsi fuori da una condizione del genere - qualora il pilota fosse incoscente da accellerare la macchina oltre la sua naturale VNE - sarà necessario abbassare il Collettivo, per ridurre l'angolo di attacco, oppure aumentare sensibilmente il numero di giri rotore. Ridurre la velocità è senza dubbio la cosa più sana da fare sarebbe di accompagnare il Ciclico con movimenti lenti e coordinati, evitando manovre brusche sui comandi. Attenzione, cercare di ridurre la velocità della macchina agendo solo ed esclusivamente sul Ciclico peggiorerà le cose! Naturalmente anche sulla pala avanzante si può generare lo stallo dovuto alla compressibilità dell'aria alle alte velocità, quando essa si avvicina alla velocità del suono, che come abbiamo visto nel capitolo precedente limita la velocità strutturale degli elicotteri.
Comando Ciclico
Il rotore di un elicottero non assolve solo al sostentamento verticale della macchina, ma esso è in grado di dirigerla dove il pilota intende portarla, in altre parole il rotore è sia portante che direzionale. Per ottenere il VOLO TRASLATO è necessario inclinare il disco rotore nella direzione desiderata, il rotore attraverso la sua azione portante trascinerà l’intera fusoliera nella direzione del moto prodotto dalla inclinazione del rotore stesso.

Il rotore quindi può essere inclinato in qualsiasi direzione polare, attraverso l'azione sul comando Ciclico da parte del pilota, l'inclinazione avverrà grazie alla combinazione della spinta verso l'alto (Portanza totale) e la direzione del moto, queste due componenti vettoriali produrranno una terza componente chiamata Portanza risultante che sarà perpendicolare al piano di rotazione del rotore che ovviamente verrà inclinato da questa forza risultante in quella data direzione. In realtà il pilota agisce con coordinamento anche attraverso correzioni mediante il comando Collettivo e la Pedaliera per stabilizzare l'assetto corretto dell'elicottero.
La fase di accelerazione è progressiva ed inizia con l'attenzione verso un punto di riferimento sull'orizzonte, che servirà al pilota per effettuare eventuali correzioni della direzione mediante la pedaliera, che come vedremo agirà sul rotore anticoppia per mantenere la direzione con precisione.
Quindi aumentando la potenza con il collettivo per incrementare la Portanza fino ad un valore predefinito, si spingerà subito dopo in avanti delicatamente e progressivamente il comando Ciclico, mantenendolo in quella posizione fino a quando la Portanza di Traslazione (Transational lift) comincerà a dare i suoi risultati, correggendo dove necessario la tendenza ad imbardare dell'elicottero con i pedali. Il muso della macchina quindi si inclina in avanti; quasi sembra punti verso il suolo, ma l'azione del Collettivo ed il generarsi della Portanza di Traslazione impedisce la collisione della macchina al suolo. Attenzione, durante la fase di decollo il pilota deve prestare molta attenzione affinchè non sconfini al di sopra di una determinata quota, che è rappresentata nel Diagramma dell'Uomo Morto, e che indica un'area all'interno della quale l'elicottero potrebbe ancora effettuare un atterraggio di emergenza in caso di piantata motore, ma riguardo a questo aspetto approfondirò l'argomento nel capitolo dedicato al pilotaggio.
La macchina - dicevamo - inizia ad accelerare in avanti fino a guadagnare ulteriore velocità fino a quando si genera la Portanza di Traslazione che poi porta il muso improvvisamente ad alzarsi. Questo è il momento in cui il disco rotore ha cominciato a comportarsi come una ala virtuale, poiché la portanza aumenta con la velocità e l'aeromobile tende a cabrare. Il pilota quindi corregge l'assetto, sopratutto diminuendo la potenza con il Collettivo per poi stabilire una inclinazione con il Ciclico leggermente in avanti fino ad intercettare la velocità di traslazione che desidera mantenere.
Nel mio primo volo assoluto in elicottero, nel lontano Settembre del 1988, il mio istruttore dopo aver portato il piccolo Breda Nardi 300 in Hovering, mi guardo e poi sollevò leggermente il Collettivo all'improvviso spingendo in avanti il Ciclico con una tale facilità, che mi accorsi dopo qualche secondo che sotto di noi l'erba del campo volo di Lugo scorreva vicina e sempre più veloce, fino a quando la cabrata che la macchina d'improvviso fece spontaneamente mi mostro il paesaggio al di sotto, che si allontanava verso il basso. Il primo volo non si dimentica mai, almeno a me non è successo e ne ricordo minuto per minuto. A quel tempo gli istruttori cercavano di impressionarci, specie con il primo approccio, forse per divertirsi o forse per renderci consapevoli che pilotare un elicottero non è proprio un gioco da ragazzi.

Il Ciclico può essere inclinato in qualsiasi direzione anche lateralmente per effettuare una virata, o se coordinati con i pedali si può effettuare una traslazione laterale. Cosa succede però con il peso dell'elicottero che ovviamente attira la macchina verso il basso? Il peso ovviamente subisce delle variazioni, sopratutto dettate dall'accellerazione angolare che la macchina subisce, inoltre esso diminuisce sensibilmente con il tempo di volo perchè l'elicottero avrà nel frattempo consumato una porzione di carburante. Tuttavia viene ad inclinarsi anch'esso ma sempre rimanendo opposto alla Portanza, proprio come avviene su una motocicletta quando si effettua una curva. La moto si inclina ma ciò che la tiene ben salda sull'asfalto è l'equilibrio che si forma tra la forza centrifuga che attira la moto verso l'esterno della curva, il peso che invece la trattiene sull'asfalto e la forza centripeda che la vuole verso l'interno della curva. Tutti fattori che agiscono nella direzione opposta l'una all'altra e che produce una inclinazione risultante. Questo è esattamente ciò che accade con un elicottero durante una virata, una cabrata o una picchiata, il suo peso rimarrà sempre opposto all'azione vettoriale della Portanza.
In realtà il peso dell'elicottero subisce della variazioni temporanee grazie alla forza di gravità, per cui è più esatto sostenere che quella che rimane invariata nella macchina (senza carburante) è la sua massa, infatti durante una virata, una cabrata o una picchiata sia la macchina che il pilota sono soggetti ad accellerazioni di Gravità positive o negative che notoriamente possono variare il valore del peso, che in alcuni casi può raggiungere anche valori importanti, tal da compromettere l'integrità strutturale dell'aeromobile.

In
realtà meccanicamente parlando, il movimento del rotore sebbene
possa apparire semplice - cioè un disco inclinato nella direzione
desiderata - nei fatti è invece piuttosto complesso.
Diversamente da quanto si possa pensare, il disco rotore non si inclina
grazie ad un cuscinetto sospeso sul mast del rotore,
oppure inclinando lo stesso mast, come invece ho più volte sentito
dire da qualche "espertone". Il movimento che assume il disco
quando si inclina in una data direzione avviene piuttosto attraverso
una variazione ciclica dell’Angolo di Calettamento
di ogni singola pala in ogni singolo punto preciso durante la rotazione.
In altre parole, ogni singola pala assume un diverso Angolo
di incidenza a seconda della posizione che essa assume lungo
la circonferenza del disco, formato dalla rotazione della stessa in
quel dato instante. Sembra un pò macchinoso, ma tutto sommano
e meno complicato di quanto sembra.
All’inizio si pensò ad un meccanismo abbastanza semplice, attraverso l’impiego di un perno snodato, al quale era fissato l’intero rotore e che veniva inclinato grazie ad un meccanismo simile al piatto oscillante, è dopotutto un sistema ancora in uso sugli autogiro. Ma risultò da subito inefficiente perché gravemente sollecitato da momenti giroscopici prodotti dalla rotazione e dalla coppia generata dai motori.
Questa condizione era difficilmente controllabile, inoltre vi erano alcuni problemi di stabilità correlati alla gestione dell'assetto che richiedeva uno sforzo notevole con movimenti molto ampii per poter gestire l'assetto della macchina, mentre nell'autogiro le cose sono molto più semplici poichè non c'è il generarsi di una coppia, giacchè il rotore gira a folle alimentato dal vento relativo, e per questo non c'è bisogno di un meccanismo complesso come il comando ciclico. (Vedi capitolo Fisica - Precessione giroscopica)

Poiché una delle proprietà più importanti del GIROSCOPIO è la PRECESSIONE GIROSCOPICA, cioè quel fenomeno che sposta di 90° in avanti il movimento precedentemente causato da un’azione di perturbazione su di una massa rotante, e dato che il rotore è una massa giroscopica in quanto rotante, la variazione di passo di calettamento dovrà avvenire 90° prima della reazione richiesta, in quanto l’inclinazione del disco rotore avverrà 90° più tardi dall’azione del ciclico. In altre parole per ottenere l'inclinazione del rotore verso destra si dovrà agire 90 gradi prima aumentando l'angolo di calettamento della pala che si trova in avanti longitudinalmente. Infatti se si osserva l'animazione in alto si noterà che le pale si muovono indipendentemente l'una dall'altra e non collettivamente, subiscono cioè una variazione dell'angolo di attacco in modo ciclico e con un anticipo di 90° rispetto alla posizione che il rotore assumerà subito dopo.
Supponiamo di avere un punto di osservazione rispetto ad una rotore di tipo Francese/Russo, cioè con rotazione oraria, ed è nostra intenzione incilnare il rotore in avanti, e poichè sappiamo che il rotore è una massa giroscopica, dunque soggetto al fenomeno di precessione, siamo consapevoli che per ottenere l'inclinazione del rotore in avanti dobbiamo applicare una forza 90° prima della inclinazione risultante. Cioè agire sulla pala quando essa è di traverso sul lato destro. Essa infatti subirà l'azione del piatto oscillante che alzandosi aumenterà l'angolo di attacco della pala che però agirà 90° dopo inclinando il rotore esattamente in avanti come si desiderava fare. Questa storia è un'altra delle questioni irrisolte dal problema delle leggende metropolitane che con fatica solo in poche occasioni sono risuscito a dimostrare, quando mi sono trovato davanti qualcuno che si opponeva a questa spiegazione, insistendo che il rotore si inclinava esattamente laddove si applicava la forza e non 90° dopo. Mah!

Collettivo
Una delle caratteristiche più interessanti - e se vogliamo davvero singolari - dell'elicottero è quella di poter effettuare il volo ascensionale, ma anche il volo a punto fisso (Hovering) potendo variare o perfino mantenere intatta la quota di volo rispetto ad un punto fisso. Affinché la macchina possa effettuare variazioni di quota, risulta necessario poter gestire la produzione della PORTANZA, in modo da ottenere una variazione della distanza verticale da un punto sul suolo in maniera efficiente e precisa. Il comando attraverso il quale il pilota può intervenire è detto COMANDO COLLETTIVO.
Si tratta di una leva posta al lato sinistro del sediolino del pilota, che egli solleverà in modo da ottenere un cambiamento dell’angolo di calettamento di tutte le pale contemporaneamente, cioè in maniera COLLETTIVA, determinando cosi una variazione di quota. La gestione del COMANDO COLLETTIVO da parte del pilota è una azione che viene fatta con estrema delicatezza, specie nella fase di distacco dal suolo. Diversamente dal comando Ciclico, il comendo Collettivo agisce contemporaneamente su tutte le pale all'unisono, modificandone l'angolo di attacco allo stesso modo, proprio come si vede nell'animazione sotto.
Durante la fase di decollo per ottenere il distacco della macchina dal suolo, si agisce sulla leva del COLLETTIVO che varia in modo omegeneo l'angolo di attacco di tutte le pale esattamente allo stesso modo, attraverso le aste che sollevano il PIATTO OSCILANTE (Swash Plate) che a sua volta spinge verso l'alto le aste cambio passo che producono una rotazione di ogniuna di queste lungo il proprio asse longitudinale.
Il piatto oscillante è diviso in due componenti separate da uno speciale cuscinetto, che fa in modo che solo la sezione superiore ruoti in armonia con il rotore, mentre quella inferiore rimane ferma; bloccata dalle aste di comando anche attraverso un ponte che ne impedisce la rotazione. I movimento del piatto oscillante è limitato alla salita ed alla discesa verticali, come mostra l'animazione per l'escursione del Collettivo delle pale, oppure esso può subire un movimento oscillatorio che avviene sul piano orizzontale per il controllo Cilclico del passo delle pale. Il piatto oscillante (Swach Plate) è governato dalle aste di comando che rispondo direttamente o attraverso dei sistemi idraulici ai comandi di Cilclico e Collettivo.

Il
rotore gira ad una velocità operativa costante ed il sistema
di compensazione di potenza della turbina (o del motore
alternativo) il GOVERNOR, provvederà
a mantenere all'interno di una escursione molto limitata i giri (RPM)
del rotore, poiché essendoci una domanda di potenza crescente
in proporzione all'azione del COLLETTIVO, è
necessario compensare con variazioni di potenza sul motore proporzionali
alla quota.
A questo proposito è importante chiarire che non si agisce sulla
variazione di giri come avviene in alcuni casi con i piccoli modellini
radiocomandati, ma sulla variazione dell'angolo di attacco delle pale
e contemporaneamente della potenza che il motore genera, con lo scopo
di mantenere i giri del rotore costanti.
La
rotazione costante del rotore garantisce la tensione perfetta ed efficiente
delle pale, per mezzo dell'azione centrifuga. Se i giri scadessero al
di sotto di una soglia minima le pale si piegherebbero su se stesse
spezzandosi con drammatiche conseguenze.
Il valore relativo al numero di giri, sia della trasmissione che del
rotore, è consultabile attraverso uno strumento apposito montato
sul pannello strumenti. Si tratta di un contagiri doppio, uno strumento
a doppio ago, gli indicatori rimarranno sempre in arco verde, cioè
in quella fascia che indica gli Rpm operativi. Dopo
aver controllato che intorno non vi siano ostacoli mobili, come persone
che si aggirano nelle vicinanze della macchina, si inizierà a
sollevare la leva del comando COLLETTIVO lentamente
con costanza fino a percepire una sorta di alleggerimento iniziale della
macchina sui pattini (o carrelli). Questa
manovra è importante proprio per capire il comportamento dell’aeromobile
in quel dato momento. In realtà si agisce anche sul Ciclico
e sui Pedali, per compensare l'incremento della coppia
(vedi
rotore anticoppia) e la tendenza naturale
del disco rotore di scarrocciare il velivolo lateralmente.
Una volta portata la macchina “leggera sui pattini”
(light on the skids) si procede continuando lentamente
e con costanza a sollevare la leva del collettivo fino al distacco completo
della macchina dal suolo, mantenendo la quota, e ovviamente l’assetto
e la direzione attraverso il controllo del famoso punto di riferimento
scelto sull'orizzonte, che per un pilota di elicotteri è fondamentale
con azioni leggere e sincronizzate sul ciclico e sui pedali.
Per essere più chiaro, portare la macchina leggera sui pattini significa carpirne in anticipo le intenzioni che essa ha di muoversi in una o più direzioni. Quando l'elicottero è leggero sui pattini - cioè è ancora appoggiato sul proprio peso ma al confine del distacco dal suolo - il pilota avverte la sensazione di spostamento in avanti, all'indietro, lateralmente od in ogni caso nella direzione che essa sta per prendere, in modo tale da posizionare i comandi in modo da contrastare ogni eventuale spostamento indesiderato prima del distacco dal suolo. Insomma non basta sollevare il colelttivo per mettersi tranquilli in volo stazionario, ma bisogna concertare anche con gli altri comandi in armoniosa sicronia ed in contatto psico-fisico con la macchina.

Il distacco
dell’elicottero dal suolo è la prima esperienza che un
neo pilota vive intensamente, ed è la più positivamente
traumatica che si possa fare per la prima volta. E’ la cosa che
non si dimenticherà mai più e per la quale vale la pena
di sacrificare le proprie energie pur di poter fare questa manovra quotidianamente.
Il decollo è l’inizio di ogni missione e mantenere la macchina
in aria come galleggiasse su di un liquido invisibile, è una
delle cose più eccitanti che confermano la singolarità
di questo aeromobile. L’intelligenza e la tenacia di quelli che
lo hanno portato fino a questo punto è senza alcun dubbio nel
segno del volo a punto fisso.
Il rumore assordante delle pale impastato con quello delle turbine;
il continuo alternarsi di ombra e luce che le pale proiettato in modo
intermittente sul cockpit e sul pilota, fanno di quelli appassionati
come me gente felice di governare una tale meravigliosa macchina, che
spesso lascia attoniti coloro che la osservano, come fosse un grande
insetto meccanico che si libra in aria; una specie di colibrì,
pur con tanto rumore e vento. Questa meraviglia è altrettanto
fantastica quando si osserva volare un piccolo elimodello in scala,
esso è solo una versione miniaturizzata della macchina madre
e risponde alle stesse identiche leggi fisiche senza alcuna eccezione
per le sue dimensioni.
Brangeggio e principio di Coriolis
Abbiamo
parlato in buona sostanza del fenomeno del FLAPPEGGIO
della pala, causato dai momenti flettenti generati durante il volo traslato,
tuttavia l'ala rotante è sottoposta ad un ulteriore fenomeno
che ha un effetto altrettanto importante sul suo comportamento. Si tratta
del movimento di BRANDEGGIO, è cioè lo
strappo generato dalle forze centrifughe prodotto dalle variazioni dell'angolo
di incidenza delle pale che si modifica notevolmente dal volo stazionario
al volo traslato.
Vedremo come le varie tipologie di rotori assolvono a questa funzione
attraverso la CERNIERA di BRANDEGGIO;
dispositivo non presente nei sistemi rigidi, perché anche in
quel caso la radice della pala oltre ad assolvere ai momenti flettenti
prodotti dal flappeggio, e sufficientemente in grado di smorzare anche
gli strappi, grazie alle caratteristiche di flessibilità e resistenza
meccanica. Il fenomeno del BRANDEGGIO è strettamente
legato all'effetto di CORIOLIS.
Per meglio comprendere il meccanismo legato all’effetto di CORIOLINS si può iniziare analizzando la velocità periferica in un dato punto della pala attraverso la formula che ne descrive il meccanismo (Vp=ω*r) dove ω rappresenta la VELOCITA’ ANGOLARE, ed r la distanza considerata dall’attacco al mast della pala al dato punto del quale si voglia calcolare la velocità periferica. Tale distanza può variare per l’effetto di CORIOLIS, essa infatti può essere modificabile verso l’alto o verso il basso, in quanto la pala è soggetta ad un movimento alternato causato per l’appunto dal flappeggio.
Durante il volo stazionario, l’inerzia mantiene le pale in rotazione alla stessa velocità, per tanto la velocità periferica di ognuna delle pale sarà uguale, in qualsiasi punto esse si trovino, poiché non esistono componenti orizzontali che possano modificare questa condizione di eguaglianza tra le pale del rotore. E’ durante il volo traslato però che esse invece assumono velocità diverse. Ogni pala infatti a seconda che si trovi in posizione AVANZANTE o RETROCENDENTE raggiungerà una velocità diversa, con conseguente variazione delle velocità periferiche.
La pala avanzante aumenterà la sua velocità generando una maggiore portanza e si troverà a traslare in quel dato punto ad una velocità maggiore. Viceversa la pala retrocedente che si troverà in una posizione di parziale stato di stallo, (flusso inverso incluso) si troverà a traslare in quel dato punto ad una velocità inferiore, arretrando leggermente.
In questa situazione si avranno non solo forti movimenti flettenti che come si è visto vengono già smorzati dal sistema di controllo del flappeggio, (momenti flettenti verticali) ma si genereranno anche forti movimenti ALTERNATI (movimenti flettenti orizzontali) che procureranno importanti sollecitazioni faticose per le pale, a meno che non si tratti di sistemi a rotore rigido, che come vedremo sono dotati di dispositivi che rendono le pale flessibili adattandole allo scopo. Il Brandeggio è in buona sostanza provocato dall'effetto di Coriolis che modifica la velocità periferica di un corpo, come avviene per la pattinatrice.
Credo che tutti abbiamo almeno una volta visto una pattinatrice che compie una piroetta su se stessa. L'atleta è in grado di modificare la velocità di rotazione a secondo della distanza delle braccia dal suo busto. Se vorra accellerare la rotazione avvicinerà le braccia al corpo, viceversa le allontanerà verso l'esterno per diminuire la rotazione.
Il movimento di flappeggio modifica la posizione del centro della massa di una pala alterando costantemente la sua posizione di origine verso l'interno o verso l'esterno e questo ovviamente produrrà una accellerazione o una decellerazione della pala, proprio come nella figura in alto. In altre parole quando la pala flappeggia verso l'alto o verso il basso essa si avvicina il proprio centro di massa al mast del rotore e questo ne provoca una accellerazione, ma quando questa si riabassa - poichè il fenomeno del flappeggio è terminato - essa rallenta la sua velocità. Gli instanti in cui la pala accellera per effetto del flappeggio avvengono rispettivamente sulla zona avanzante e retrocedente, mentre i momenti in cui la pala decellera sono quando essa è lungo l'asse longitudinale della fusoliera.
Il sistema di BRANDEGGIO, attraverso dispositivi appositi, ha lo scopo di ammortizzare l’accelerazione (Leading) o la decelerazione (Lagging) della pala durante la sua fase di rivoluzione. Su ogni cerniera di BRANDEGGIO vi sono degli ammortizzatori particolari, progettati per assorbire il movimento alternato in avanti ed all'indietro della pala durante il volo traslato. Le cerniere di Brandeggio hanno anche lo scopo di assorbire gli strappi provocati dall'avvio del rotore da fermo, che potrebbe danneggiare il punto di attacco della pala con le articolazoni, inoltre questi particolari dispositivi sono spesso costruiti in materiali speciali e possono essere dotati di meccanismi a frizione o ad olio. Gli smorzatori di flappeggio sono conosciuti con il termine di DUMPERS (ammortizzatori o smorzatori).
Nei modellini radiocomandati invece la cerniera di brandeggio è rappresentata dalla piccola vite che tiene fissata la pala alla piccola morsa della cerniera di cambio passo del rotore. Purtroppo mi è capitato di vedere qualche aeromodellista che non avendo mai approfondito le sue nozioni teoriche sul volo degli elicotteri, ha incollato o stretto eccessivamente quella piccola vite, bloccando il movimento libero di brandeggio della pala, che invece deve essere capace di oscillare proprio per compensare l'effetto di Coriolis. Ho cercato di convincerlo che si trattava di una manovra errata, provando a spiegargli cosa è il movimento di brandeggio e perchè è importante, ma in una occasione uno mi rispose che io di elicotteri non ne capivo niente, e che le viti sono fatte per essere strette...........A quel punto non ho voluto insistere, ma ho visto il piccolo elicottero volare in modo scoordinato specie in volo traslato e non credo sia stato un caso.
©Gino D'Ignazio Gizio