G455 CellCraft
Il CellCraft
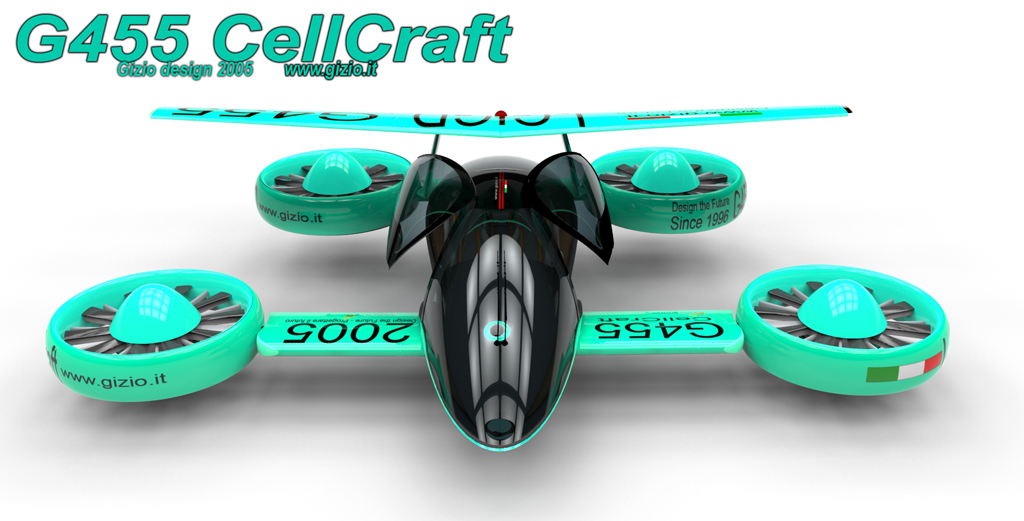
G455 è una variante del modello madre il G450,
di cui conserva in buona parte il 90% delle componenti
eccetto che per i rotori che in questa macchina hanno una struttura
diversa.
Il G455 nasce principalmente per il soccorso medico
e l'impiego nelle forze di polizia, sebbene si sia pensato anche ad
una versione civile. La macchina è dotata di quattro elettro-rotori
ad anello di diametro inferiore a quello della sorella gemella: la G450.
I rotori sono provvisti di due dischi separati a dieci pale in carbonio
separate da uno statore intermedio, che funge anche da telaio sul quale
sono montati i due motori che azionano ognuno un singolo rotore. Dunque
anche in questo caso abbiamo l'impiego di due motori per ogni rotore,
ma essi ruotano in senso opposto l'uno rispetto all'altro.

Entrambe le macchine infatti si comportano diversamente quando passano dalla modalità di volo verticale a quella orizzontale. In decollo l'aeromobile richiede una notevole quantità di energia, poiché non si genera alcuna portanza sulle ali, che si comportano come superfici passive, e tutta la spinta è esclusivamente indirizzata ad accelerare una quantità d'aria pari o superiore al peso dell'aeromobile al di sotto di essa, affinché il volo avvenga; terzo principio della dinamica.
In questa condizione infatti sia le unità MPU, sia gli elettro-rotori devono lavorare al massimo delle loro capacità.

Il pilota deciderà a discrezione se intervenire spegnendo o lasciando in funzione l'unità MPU in funzione. Il sistema AFC è anche in grado di intervenire sulla durata della vita delle unità MPU, memorizzando i tempi di funzionamento di ognuna separatamente, facendo in modo di alternarne il funzionamento. Se ad esempio nella missione precedente si è condotto un volo di un'ora utilizzando solo l'unità MPU N°1 ( anteriore) nel volo successivo (qual'ora ci fossero le condizioni come sopra descritto) il sistema di controllo dinamico del volo Utilizzerà solo l'unità MPU numero due (posteriore).

L'AFC
è in grado automaticamente di riavviare l'unità dormiente
qualora le necessità del volo subissero delle variazioni, come
una forte o improvvisa riduzione della velocità prossima alla
fase di transizione verticale, e questo senza alcun intervento da parte
del pilota. Questi potrebbe tranquillamente continuare a concentrarsi
sul percorso di volo e sulle manovre appropriate da eseguire.
L'AFC dunque riporterebbe la situazione automaticamente
ad una condizione di equalizzazione della potenza necessaria al volo,
riavviando se necessario l'unità MPU dormiente.
Questa strategia tecnologica è stata sperimentata per la prima
volta sul modello G445 , poichè i modelli precedenti
non permettevano l'alternarsi delle unità MPU
in volo, giacchè richiedevano una notevole quantità di
potenza anche in volo traslato. Inoltre erano costruiti in buona parte
con materiali tradizionali ed erano complesse meccanicamente, queste
caratteristiche nell'insieme assorbivano molta potenza, come nei modelli
G416 e G440.
Architettura del velivolo
Il G455
cosi come il G450 e successivi rispondo perfettamente
al criterio che per anni ho inseguito, in termini di design complessivo,
come lo sviluppo di una nuova cellula completamente rivisitata e per
niente legata alle forme classiche, che si ripetono costantemente nel
settore aeronautico, pur mantenendo degli ottimi risultati per quanto
riguarda il coefficiente di resistenza di forma, che risulta senza dubbio
eccellente.
Il muso molto pronunciato in avanti delle due macchine oltre a migliorare
la penetrazione aerodinamica, occupa uno spazio che è stato ceduto
all'alloggiamento della unità MPU numero uno:
quella anteriore. All'interno dello stesso alloggiamento sono ospitate
anche le unità ESC per il controllo dei motori
anteriori e l'Inverter della unità MPU numero
uno.
Il guscio anteriore che ospita anche il pannello strumenti contiene
i sistemi di controllo elettronico del volo come il più importante:
l'AFC (Automatic Flight Control). Questo dispositivo
è presente sin dai primi progetti, quello del G150
ed anche del birotore fisso, il DDRH/DDVL.
Nella zona della coda invece è installata l'altra unità
MPU; la numero due, in quel punto sono sistemati anche
i carrelli posteriori ed alcuni sistemi di gestione della potenza erogata
dalle unità, come gli Inverter digitali e le unità ESC
che sono collegate ai motori.


Quando operavo come pilota di elicotteri, uno delle cose spiacevoli e faticose da fare era di portare i velivoli in Hangar a mano, spingendoli dopo aver assicurato i pattini con delle piccole ruote. Spesso le macchine essendo pesanti e piene di carburanti era impossibile muoverle da soli. In altre occasioni ci si serviva di carrelli elettrici, che sollevavano l'elicottero e lo spostavano facilmente da un punto all'altro. Quando cominciò la progettazione del primo G150 una delle cose che volli affrontare e risolvere era la limitazione del movimento a terra, così pensai che dotare le ruote del carrello di atterraggio di motori elettrici autonomi sarebbe stata la soluzione ideale al movimento autonomo a terra del velivolo.

Attraverso l'utilizzo della Flight Card - un dispositivo elettronico appositamente progettato - è possibile perfino telecomandare il velivolo dall'esterno, compiendo la manovra a terra in tutta sicurezza. Tuttavia l'uso della FC in caso di manovra a terrà limiterà molto la velocità massima di movimento, mantenendola a quella non superiore al passo d'uomo.
Sistemi di stabilità dinamica del volo AFC
Il sistema di controllo automatico del volo, è assolutamente indispensabile in questo tipo di aeromobile, poiché esso ne garantisce la stabilità dinamica in volo. Gli aeromobili multi-rotore infatti per loro natura sono estremamente instabili, perché i rotori interferiscono tra loro nella produzione di turbolenze e nella costante variazione di coppia tra essi. Questi due fenomeni non sono facilmente controllabili manualmente e sono stati in buona parte causa degli insuccessi di alcuni progetti del passato che hanno visto prototipi di multi-rotore attraversare lo scenario della sperimentazione aeronautica.
Il sistema di controllo del volo, è un dispositivo composto da due unità gemelle, che interagiscono parallelamente, regolando alla perfezione ed in modo costante la potenza necessaria che le unità MPU devono produrre per i sistemi e sopratutto per gli elettro-rotori. Gli elettro-rotori sono gestiti anch'essi dal sistema AFC che ne regola in tempo reale la velocità singolarmente, in modo da mantenere in equilibrio la coppia e l'assetto della macchina perfettamente equilibrato e livellato.

Il sistema
AFC si serve di una serie di sensori, accellerometri
ed un girsocopio dinamico parallelo. Questi tre elementi principali
gli forniscono informazioni necessarie a stabilire la posizione e l'assetto
nello spazio della macchina durante il volo. L'AFC
infatti può intervenire su ognuno degli elettro-rotori indipendentemente,
regolando la potenza perfino in caso di cattivo bilanciamento del peso
a bordo.
Uno dei vantaggi dei sistemi a multi-rotore è la possibilità
di disporre di un ampia area di carico, il centro di gravità
è molto più ampio di quello di un elicottero, che per
il fatto di essere sospeso in un solo punto che è esso stesso
il punto di spinta, richiede una attenta procedura di carico e calcolo
del peso e del bilanciamento. Un multi-rotore invece è provvisto
di quattro punti di spinta e dunque il suo centro di gravità
è molto più ampio, tuttavia è staticamente e dinamicamente
particolarmente instabile come detto prima. Tuttavia il sistema di controllo
del volo e di assetto, l'AFC effettua una equalizzazione
della spinta degli elettro-rotori, in modo tale da mantenere l'assetto
sempre perfettamente orizzontale. Questo è uno dei vantaggi di
questo tipo di velivoli. Dunque si può distribuire il carico
a bordo con maggiore flessibilità grazie anche a dei sensori
inseriti all'interno dei carrelli di atterraggio che sono in grado di
calcolare il peso in ogni punto della macchina, fornendo una mappa di
carico che evidenzia le zone più cariche da quelle meno cariche.
Questo è un ottimo sistema di ausilio al pilota, che potrà
facilmente spostare il carico nella zona più ottimale.
Il controllo del volo tuttavia adotterà sempre e comunque le
necessarie correzioni di assetto, aumentando o diminuendo la potenza
dei motori nelle quattro aeree di spinta, in modo da mantenere l'assetto
sempre perfettamente livellato.
Il G455 e la sua sorella gemella, il G450,
sono gli ultimi aeromobili da me progettati e pubblicati qui su questo
sito, altri progetti sono stati sviluppati ed altri sono ancora in fase
di sviluppo, si tratta tuttavia di macchine aventi le stesse caratteristiche
che ho definito con il termine di ERTLA (Electric
Rotors Trasmissionless Aircraft) o semplicemente TLA
(Trasmission Less Aircraft) e cioè velivoli aerei privi
di organi di trasmissione dotati di propulsione elettrica.
Conclusioni
Il G455
come il G450 rappresentano una nuova frontiera nel
settore aeronautico e velivoli del genere potrebbero aprire nuove nicchie
di mercato, sviluppando nuovi ruoli e compiti ai quali gli elicotteri
per limitazioni evidenti non possono assolvere, come il volo ad alta
velocità oppure operazioni all'interno di aree ricche di ostacoli,
che comprometterebbero la sicurezza dei rotori esterni.
Molte sono le innovazioni pensate su questi progetti, e tante non sono
state menzionate in questa esposizione. Il mio sogno è di realizzare
almeno una macchina di queste, ed esserne personalmente il collaudatore,
ma so che questa possibilità mi sarà negata per mancanza
di finanziamenti, che mi potrebbero aiutare in tal senso. Sono tuttavia
sicuro che in un prossimo futuro - forse non tanto lontano - ci sarà
una sorta di rivoluzione che vedrà velivoli come i CellCraft
o perfino gli EJ sullo scenario aeronautico; almeno
me lo auguro.