G440 CellCraft (2003)
Cinque
anni dopo il secondo progetto della G416
CellCraft avevo completato una serie di studi per
migliorare quel progetto con una nuova macchina, cercando di mantenere
sempre lo stesso obbiettivo, e cioè compattezza del velivolo ed
estrema versatilità sia in volo verticale che orizzontale. Dopotutto
gli obbiettivi principali relativi all'abitabilità, alle tecnologie
di interazione con il pilota, ed il design aveva già in buona parte
soddisfatto i criteri che inseguivo.
Il velivolo veniva fuori da una serie di ulteriori progetti che si distanziavano
dal G416B di circa 15 diversi studi successivi. I principi
fondamentali erano comunque gli stessi della sorella precedente, e cioè
sistema meccanico di trasmissione a disco, con due turbine, che per la
prima volta verranno sistemate una in prua e l'altra in coda al velivolo,
in modo da distribuite sia il peso che la potenza in maniera più
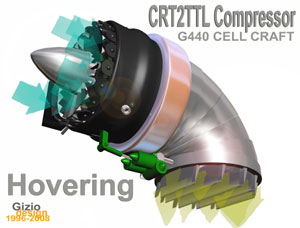
omogenea. Anche in questo caso si trattava di un velivolo con architettura
ibrida, ma ora i motori elettrici erano stati inseriti all'interno dei
compressori di spinta, costituiti da due rotori controrotanti intubati
e protetti da uno statore in avanti con palette regolabili collettivamente
per la variazione della potenza in volo traslato, questa soluzione inoltre
aumentava il livello di sicurezza durante le operazioni a terra, poichè
i rotori non erano accessibili direttamente.

Rotori-Compressori
Il sistema di spinta come già accennato è stato modificato dal quello originario progettato per il G416, in modo particolare nel dispositivo di deviazione di spinta che questa volta è di tipo telescopico. Il dispositivo è composto da tre anelli flessibili che possono essere orientati su un piano quasi orizzontale per la spinta anteriore in modalità di volo traslato ad alta velocità, oppure verso il basso per il volo verticale o in hovering.

Il sistema ibrido progettato sul G440 permetteva inoltre di guadagnare circa tre minuti di volo con alimentazione addizionale elettrica rispetto al G416 che non superava i 4 minuti di volo in modalità elicottero. Nel G440 CellCraft il tempo di volo addizionale poteva raggiungere i sette minuti, sufficienti per operazioni in volo sopratutto in modalità "elicottero".

Il controllo direzionale della macchina in volo verticale avveniva attraverso la variazione dell'angolo collettivo delle pale di ogni rotore-compressore indipendentemente e contemporaneamente alla variazione della potenza dei motori elettrici. Per poter effettuare una rotazione, una imbardata ad esempio, il sistema di controllo del volo AFC attraverso l'azione del pilota modificava la coppia che si generava tra i rotori che avevano una rivoluzione in senso orario, rispetto ai due reciproci che invece avevano una rotazione in senso antiorario. Questo era possibile anche modificando contemporaneamente l'angolo di attacco degli statori mobili, che aumentavano o diminuivano sensibilmente la quantità di aria che veniva aspirata dai rotori-compressori.
Se invece si voleva traslare lateralmente, il sistema AFC aumentava la spinta dei rotori di un lato diminuendo quella di quelli posti al lato opposto, e cosi via dicendo.

Tra i progetti elaborati in 3D, vi era anche una versione EMS appositamente sviluppata per questo tipo di compito, sebbene il principale impiego del G440 fosse rivolto sopratutto al trasporto privato ed al possibile impiego nelle forze di polizia; versione che non fu mai sviluppata.

Architettura
Buona parte
della macchina era costruita in alluminio e questo includeva la parte
inferiore della cellula, e l'ala alta principale, ormai tipica soluzione
dell'architettura dei miei progetti CellCraft.
Il resto del velivolo era in buona parte costruito in materiale termoplastico
e carbonio, uniti con supercollanti di nuova generazione. Questo permetteva
al velivolo di conservare una leggerezza ed al contempo una eccellente
robustezza.
L'abitacolo delle G è sempre stato piuttosto
spazioso, poiché i motori e le componenti meccaniche sono state
fin'ora sistemati al di sotto del centro di gravità del velivolo,
inoltre in questo progetto specifico i due motori sono stati posizionati
rispettivamente uno in avanti e l'altro in coda al velivolo, ed anche
questa rimarrà una formula costante nei progetti successivi,
quelli che ho classificato come TLA (Transmission Less Aircraft)
e cioè velivoli senza trasmissione meccanica. Questa idea era
già il concetto principale del G150, e ritornerà
sul progetto successivo denominato G445 del 2004,
fino ai successivi G450/455 del 2005.
Il modello G440 tuttavia rimane fino a quel momento
il velivolo di dimensioni maggiori della serie CellCraft
che verrà superato in dimensioni dal più grande G450/455
ed grande G500 pensato in modo particolare per il soccorso
aereo con una capienza di otto posti, ed un sistema di propulsione simile
a quello sviluppato più tardi con il G445. Mentre
il G440 rispetto al modello precedente ha guadagnato
un posto a sedere con un totale di quattro passeggeri più un
pilota.

Sistemi di controllo del volo
Cosi
come il predecessore il G440 è dotato dei dispositivi
di volo e di controllo della stabilità pressoché identici
a quelli a bordo del G416. In modo particolare il sistema
principale di volo AFC (Automatic Flight Control) che
però in questo ultimo velivolo agisce anche sugli stabilizzatori
anteriori di tipo Canard che vengono regolati lungo tutto il corso del
volo, per correggere l'assetto in tempo reale.
I comandi di volo sono pressoché identici a quelli già inseriti
sul G416, con il controllo di potenza e di imbardata
sul lato sinistro, che sostituisce il collettivo e la pedaliera di un
comune elicottero, ed il controllo di assetto sul lato destro, che invece
sostituisce il comando ciclico. Su entrambe le testate dei comandi di
controllo ci sono due display di servizio, che assolvono ad ulteriori
funzioni, come il cambio di frequenza radio; il controllo delle luci di
atterraggio; i carrelli etc. Entrambi i dispositivi sono di tipo tattile
e non subiranno ulteriori modifiche fino al 2005, con
l'introduzione di una Flight Card, e di un comando che
ricorda per qualche verso il collettivo, ma questo è un capitolo
che riguarda il modello G450/455.
Anche in questo progetto G440 era previsto l'impiego
della SmarthChair che tuttavia si trova i posizione più
elevata rispetto al progetto precedente, (G416) che invece
la vedeva molto vicino al pavimento, conferendo al pilota una seduta sportiva
come fosse all'interno di una macchina da competizione con lo scopo di
ridurre le dimensioni verticali e le sollecitazioni gravitazionali.

Sicurezza
I carrelli
di atterraggio sin dal primo progetto del 1996, con
il G150 erano dotati di piccoli motori elettrici che
permettevano al velivolo di muoversi in maniera indipendente al suolo,
senza l'ausilio di alcun trattore ausiliario, ma era necessario che
almeno una unità MPU fosse in funzione. Il modello
G440 è invece in grado di muoversi al suolo
attraverso tre piccoli elettro-carrelli in modo completamente autonomo,
e cioè a motori spenti dunque silenziosamente con l'ausilio delle
batterie di bordo.
Il G440 era in grado di decollare sia in modalità
verticale, sia in modalità orizzontale attraverso una corta corsa
su una pista asfaltata, o perfino effettuare un avvicinamento di tipo
aeronautico, per poi rallentare e posarsi dolcemente sul primo pad di
atterraggio disponibile.
In caso di avaria dei motori in hovering la macchina si serve dei quattro
motori elettrici che verranno sovralimentati e quindi sacrificati per
compiere un atterraggio morbido, inoltre degli airbag
posti al di sotto della fusoliera renderanno l'atterraggio più
sicuro. Questi strumenti di sicurezza sono particolari, poiché
dotati di una speciale valvola che subito dopo il gonfiaggio si apre
automaticamente in modo che al momento dell'impatto l'aria contenuta
all'interno degli airbag possa in parte uscire liberamente, impedendo
all'aeromobile di rimbalzare pericolosamente sul terreno.


Conclusioni
Il G440, pur essendo molto avanzato al momento in cui lo sviluppai non aveva ancora soddisfatto alcuni criteri come il consumo orario di carburante, che rimaneva sopratutto in volo verticale molto elevato. Inoltre la eccessiva complessità meccanica era ancora un problema per me, poiché miravo alla completa eliminazione o quanto meno riduzione estrema di componenti meccaniche, giacché puntavo molto sulla propulsione elettrica dei velivoli futuri. La macchina nel suo insieme era tuttavia molto bella e la sua architettura influenzerà decisamente i progetti successivi.
