Motori Brushless I motori elettrici si suddividono in due classi differenziate, quelli con spazzole (Brusched) come quelli più comunemente impiegati in elettrodomestici o in piccoli giocattoli ed i motori senza spazzole o ad induzione (Brushless). I motori a spazzole (Brushed) sono notoriamente rumorosi, e l'attrito delle spazole sul rotore oltre a produrre inutile attrito ed usura produce anche disturbi elettromagnetici che non sono utili ai complessi dispisitivi elettronici di cui è fatto un multirotore. Con l'avvento dei piccoli computer miniaturizzati, e dei potenti transistor è stato possibile re-inventare il classico motore elettrico, rinnovandolo completamente prendendo a modello il motore ad induzione trifase inventato da Nicola Tesla che eliminò le spazzole. I motori BLDC (BrushLess DC) o meglio motori senza spazzole a corrente continua, con magneti permanenti garantiscono durabilità, affidabilità, precisione e dimensioni contenute. Il funzionamento di un motore BLDC è leggermente più complesso se paragonato ad un motore elettrico classico. |
|
 |
|
Questo tipo di motore è diviso in due sostanziali classi dovute alla costituzione differenziata della sua struttura, infatti essi possono essere Inrunner oppure Outrunner. Il motore tipo Inrunner è composto da un rotore interno provvisto di magneti permanenti ed uno statore esterno che invece è formato da piastre sulle quali vi sono gli avvolgimenti in rame. E' un tipo di motore solitamente di grandi dimensioni o applicazioni industriali o per le auto elettriche dove è molto diffuso. Diversamente il motore di tipo Outrunner è più piccolo e molto adatto al modellismo e quindi anche ai multirotori. La sua caratteristica è quella di avere il rotore esterno con magneti permanenti fissati su di un cilindro attraversato da un asse che lo mantiene mediante due cuscinetti alla strutture centrale dove è alloggiato lo statore. |
|
 |
|
In entrambi i casi i rotori sono costituiti da una serie di magneti disposti in modo da avere polarità opposte, con orientamento nord e l'altro di fianco con orientamento sud. Il numero di magneti è pari poichè devono esserci lo stesso numero di magneti con fase magnetica opposta per bilanciare il campo magnetico e lo stesso il numero di avvolgimenti. I motori ad induzione senza spazzole funzionano in modo leggermente complesso infatti gli statori che sono provvisti di avvolgimenti o bobine di rame possono assumere alternativamente la polarità positiva o negativa, in modo da attrarre o respingere i magneti alternativamente disposti con orientamento opposto tra loro. Infatti diversamente dai motori con spazzole nei quali basta immettere una corrente continua in una direzione per attivare il rotore attraverso la rotazione del campo magnetico sul rotore, nel motore ad induzione le cose stanno in modo molto diverso e non è sufficiente iniettare elettricità sugli avvolgimenti per far ruotare il motore. ESC (Electronic Speed Control) Per poter muovere il rotore le bobine devono essere attraversate da una corrente a fasi alternate e questo avviene tramite un dispositivo elettronico di controllo della velocità dei motori chiamato ESC che genera impulsi eletrici alternando la fase sugli statori (avvolgimenti) come è rappresentato nell'animazione sopra. Si tratta di un circuito elettronico addetto al controllo della velocità dei motori, che avviene con estrema precisione e con uno specifico limite di potenza. Non è possibile ad esempio utilizzare un ESC progettato per un carico di alimentazione diverso dalle sue specifiche tecniche o per un motore con caratteristiche differenti da quello per cui l'ESC è stato progettato. Infatti queste unità sono progettate per poter fornire il massimo delle prestazioni ai motori, e richiedono una attenta cura nella scelta. Per questo i motori per multicopteri sono dotati del dispositivo elettronico di controllo della velocita attraverso variazione di fase e di frequenza della corrente sugli avvolgimenti chiamati ESC (Electronic Speed Control). |
|
 |
|
Anche qui ci troviamo ancora una volta di fronte ad un dispositivo elettronico complesso, composto da un piccolo processore che è in grado di trasformare la corrente che gli viene immessa in frequanza e fase alternata in modo da eccitare gli avvoltimenti in maniera alternativa per far ruotare con precisione il cilindro che contiene i piccoli magneti con polarità alternata Nord, Sud. L'ESC ha due ingressi, uno relativo ai dati provenienti dall'unita centrale composto da tre cavetti, rispettivamente, Giallo (PWM in ingresso), Arancio (BEC +5V in uscita), ed infine il Marrone che rappresenta il Ground (GND). A questi tre piccoli cavetti sono aggiunti due più dippi Rosso/Nero che trasportano la corrente continua proveniente dalla batteria e che identificano le loro polarità. Nella zona opposta invece ci sono tre uscite che rappresentano i tre canali separati che vanno ai motori, e che rispettivamente rappresentano le fasi A,B e C. Lo importante qui è proprio il piccolo circuito che rappresenta l'ESC infatti il suo funzionamento dipende dal flusso digitale di informazioni che proviena dall'Unità Centrale al quale è collegato mendiante un bus (cavetto multicolore) che ne identifica anche la posizione ed i senso di rotazione del motore. L'Unita centrale infatti è provvista di bus numerati da un valore di 4 fino ad 8 che rappresentano i motori che possono essere gestiti in base alla configurazione della macchina. Ad ogni bus viene collegato il cavetto di controllo che proviene dall'ESC. Durante il funzionamento all'interno dell'ESC circola la corrente ad elevato amperaggio per una macchina cosi piccola, proveniente dalla batteria via Bus di distribuzione. Il cavetto a tre poli che riceve gli impulsi di controllo dalla centralina attraverso dei parametri prestabiliti fa in modo che la frequenza e la corrente varino sugli statori in modo da modificare la velocita di rotazione entro un tempo minimo di un millisecondo a 0% di potenza fino ad un massimo di 2 millisecondi con potenze vicino al 100%. Questa variazione del rapporo potenza/tempo è dato anche dalla modalità di volo e dalle caratteristiche della macchine, esse sono tuttavia accettabili e rendono il multirotore facilmente controllabile anche in situazioni difficili come manovre evasive da ostacoli improvvisi come una potenziale collissione con uccelli, esperienza purtroppo accadutami in una sfortunata circostanza dalla quale non riuscii a salvare ne il volatile tantomeno la macchina che rimase incastrata in un rovo. Alcuni ESC possono essere settati attraverso delle procedure o dei software per adattarli ad esempio a motori diversi da quelli di origne, ma aventi le stesse caratteristiche, oppure per stabilire la soglia di tenzione massima etc. Altri non hanno alcun accesso digitale e dunque non è possibile intervenire per modificarne le caratteristiche. Maggiore è la potenza che esso deve sostenere, maggiore è il suo peso ed il suo costo, è dunque importante controllare che il motore che deve essere alimentato dall'ESC, non funzioni al di sotto dell'amperaggio che il dispositivo è in grado di sopportare. Viceversa un ESC sotto potenziato si riscalderà subito, con la possibilità di rompersi durante il funzionamento o con la perdita probabile del multicoptero se questi è in volo. Gli ESC sopportano solo alcuni tipi di batterie poichè sono progettati per sostenere tensioni e correnti diverse, in accordo con i motori che alimentano. Un ESC 30A infatti supporta batterie fino a 4S (quattro elementi) mentre un E600 può supportare batterie fino a 6S (sei elementi). |
|
 |
|
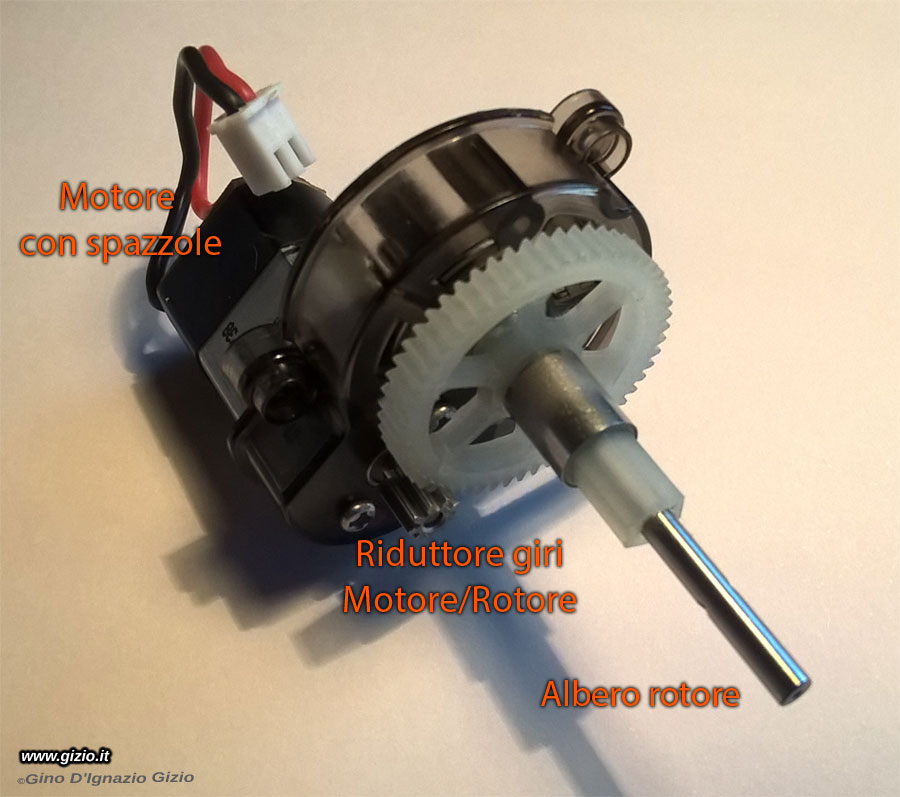
Nella fase di messa a punto le connessioni vanno inserite in maniera diversa, a seconda del senso di rotazione del motore, che come vedremo in seguito può assumere una rivoluzione oraria (CW) o antioraria (CCW) in base alla posizione che esso assume sul braccio del multicoptero. L'ESC assume anche un altra funzione poichè fa in modo che le batterie LiPo non vengano danneggiate. Le batterie al Litio se scaricate al di sotto di una soglia minima possono ricevere danni permanenti, la funzione ulteriore degli ESC è anche di garantire una corrente costante ai motori per evitare che essi possano subire variazioni inappropriate durante il volo a causa della progressiva scarica della batteria. Alcuni ESC possono essere programmati per rispondere diversamente alle variazioni di potenza, oppure invertire il senso di rotazione dei motori istantaneamente a seconda della posizione nello spazio del multicoptero, come avviene nei piccoli multirotori acrobatici o da laboratorio, che sono capaci di rotazioni incredibili o perfino di volare capovolti. Non tutti i multirotori sono provvisti di sofisticati sistemi o di motori Brushless, anzi quelli economici montano piccoli motori convenzionali a spazzole e la manutenzione deve essere costante con l'aggiunta di piccole goccioline di olio ai due lati del perno del rotore perchè non hanno cuscinetti ma solo delle piccole bronzine di ottone. Molto spesso sono connessi meccanicamente a dei riduttori di giri che ne migliorano le prestazioni ma ne aumentano l'attrito e la resistenza meccanica consumando con il tempo i dentini degli ingranaggi di accoppiamento. E' il caso del Syma X8 un multirotore ottimo per allenarsi ed imparare a mantenere il controllo di precisione del volo poichè questo piccolo velivolo non è provvisto di unità GPS e dunque è il pilota che deve controllare il velivolo acquisendo con il tempo sempre più precisione. Questi sistemi sono molto semplici e per questo molto economici, ma permettono l'avvicinamento progressivo al volo multirotore, e spesso volano davvero bene come nel caso del SYMA. |
|
| ©Gino D'Ignazio Gizio | |