Piattaforma PAM (2005) Fin dai primi anni 40 molti ingegneri e costruttori privati hanno provato a progettare - ed in alcuni casi a costruire - prototipi di VAP (Velicoli aerei personali) , alcuni di questi aeromobili erano parte di una singolare categoria nella quale il rotore era posizionato al di sotto del piano del pilota, invece che tradizionalmente in testa alla fusoliera. Questo modo di volare fu soggetto a diverse controversie, cosi come entusiastiche previsioni, ma sostanzialmente il principale obbiettivo a quel tempo era di dotare ogni singolo soldato al fronte, di un mezzo che lo avrebbe potuto muovere velocemente sul campo di battaglia, e soprattutto di superare qualunque tipo di campo minato. |

Nella
maggior parte dei casi la propulsione era prodotta da un doppio rotore
contro-rotante, ma vi erano anche sistemi a rotore intubato come nel
caso del HILLER VZ PLANE (1955). In altri
prototipi il rotore aveva una dimensione maggiore e disponeva perfino
di uno stabilizzatore orizzontale come il De Lackner DH
4 conosciuto anche come aerociclo, infatti questa macchina
possedeva un manubrio di tipo motociclistico, infine vi erano macchine
che utilizzavano un sistema di propulsione con getti alle estremità
delle pale per risolvere il problema della coppia generata dalla rotazione
di una massa " in questo caso il rotore" , prodotto tipico
delle trasmissioni meccaniche del moto sul rotore ;era il caso del Gluhareff
MEG-3X (1960).
Il primo studio che ho compiuto per lo sviluppo di una versione definitiva
del prototipo di VAP commissionatomi della PAM
che utilizza queste architetture, è stato basato su tre differenti
progetti che hanno trovato la soluzione nel progetto denominato Delta.
L'anno successivo sviluppai un mio progetto denominato F-Vespa,
più elaborato di quello PAM, ma in buona sostanza funzioando
sullo stesso principio.
L’aspetto più interessante della piattaforma PAM è il modo in cui l’aeromobile è pilotato o se si vuole controllato. Il sistema non richiede uno speciale meccanismo di controllo come ad esempio il ciclico, necessario negli aeromobili con rotore in testa come gli elicotteri o gli autogiro, la piattaforma si muove in maniera spontanea semplicemente inclinando il corpo nella direzione desiderata, questo produce un momento, che come risultato sbilancia l’assetto dell’aeromobile in una data direzione, ed il resto viene prodotto dalla spinta del rotore che produrrà come combinazione ed effetto il movimento traslato nella direzione desiderata che sarà il prodotto della risultante. Se si preferisce è come andare in moto, il pilota inclina semplicemente il proprio busto nella direzione desiderata e la moto risponde assumendo lo stesso assetto.
La piattaforma è in sostanza una sorta di moto volante, per controllare l’assetto il pilota deve mantenere una posizione centrale . Il controllo della potenza avviene attraverso un joystick che modifica l’angolo di attacco collettivo dei due rotori per permetterne il decollo. Attualmente numerosi vantaggi tecnologici sono favorevoli per lo sviluppo di un tale tipo di macchina, il primo aspetto è dato dal largo assortimento di materiali di nuova generazione, cioè leggeri e resistenti al contempo , il secondo punto è caratterizzato dalla larga diffusione e sviluppo esponenziale delle tecnologie elettroniche, che permettono di ottenere prestazioni straordinarie con un buon livello di efficienza ai sistemi applicati. Al momento la piattaforma PAM vola con due motori alternativi tuttavia il gruppo sta iniziando la sperimentazione di un prototipo biturbina , versione che ho scelto come sistema da sviluppare in forma di progetto commerciale, dopotutto i motori a turbina sono leggeri, di piccole dimensione e capaci di produrre potenze maggiori rispetto ai motori alternativi.
La PAM GROUP ha dichiarato che la piattaforma al momento non è in grado di superare un’altitudine dal livello del mare superiore ai 30-40 metri , tuttavia come di frequente accade , le tecnologie offrono sempre una maggiore opportunità per migliorare gli aspetti tecnici di ogni invenzione ,inoltre il lavoro costante del capo ingegneri Bob Pegg riuscirà sicuramente ad ottenere risultati e prestazioni migliori aumentando la capacità operativa della piattaforma, dopotutto la versione biturbina non ha ancora iniziato i voli sperimentali , a noi piace pensare di riuscire a produrre uno dei più importanti strumenti di sicurezza dei prossimi anni, per migliorare la nostra vita quotidiana.
ALPHA
La
versione ALPHA (2003) ha richiesto
un attento studio iniziando da ogni singolo aspetto architettonico dell'aeromobile,
in modo da formulare un immagine finale per un prototipo futuro. Per poter
iniziale la progettazione è necessario condurre una accurata ricerca
storica, questa tipologia di aeromobili è davvero interessante,
le dimenzioni, la semplicità e le singolari caratteristiche confermano
che l'idea è potenzialmente applicabile in molti contesti.
Dunque il risultato del mio disegno è frutto di numerose considerazioni
che proverò ad illustrare lungo questi articoli, naturalmente in
accordo con la meccanica sviluppata da PAM GROUP.
 |
|
 |
|
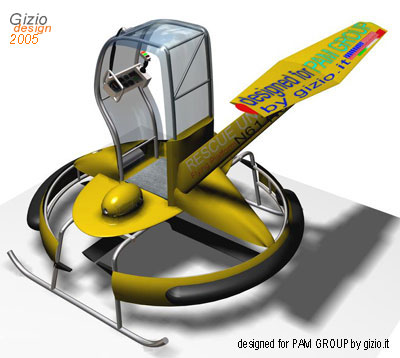
In caso di operazione di salvataggio la missione potrebbe rivelarsi alquanto difficile senza una copertura delle "lame rotanti", cosi ho disegnato questa struttura a campana, piuttosto leggera perchè fabricata in materiale composito. Il telaio è costruito in alluminio ed acciaio aeronautico; ho inoltre mantenuto un tipo di pattino elicotteristico, in modo tale che il pilota ed eventuali passeggeri in caso di emergenza possano facilmente accedere alla base di sostegno. Tra le versioni disponibili ho disegnato anche una macchina provvista di carrelli di atterraggio , con quattro piccole ruote aventi un angolo di 45° per mantenere una stabilità al parcheggio come il leggendario elicottero WASP Inglese. Le ruote sono orientabili a piacimento e possono muovere la piattaforma al suolo mediante dei motori elettrici interni come per i CELL CRAFT©.
Diversamente dai precedenti storici, il pilota è protetto mediante una cabina coperta da un cupolino trasparente che trasforma l'area di controllo in un cockpit, qualora necessario è possibile montare delle porte laterali. Come si sarà notato su entrambi i lati del cockpit vi sono delle maniglie utili in caso di operazioni di salvataggio per poter caricare almeno due persone; una per lato. |
Su
entrambi i lati , anteriore e posteriore, vi sono due grosse aree
pneumatiche come supporti protettivi antiurto contro eventuali ostacoli
a terra , ma anche come galleggianti ,in caso di ammaraggio mantenedo
la piattaforma in superficie. Circa il cockpit in se stesso, avrete notato che sebbene il pilota debba mantenere una posizione eretta, manca un sistema di ancoraggio di questi al velivolo, dunque è risultato necessario disegnare una sorta di sgabello al quale il pilota viene assicurato mediante una serie di cinture, che al contempo assicurano libertà di movimento per il controllo della macchina. Infine uno stabilizatore aerodinamico suggerito da Bob Pegg risultava necessario per un miglior controllo in volo traslato, anche se le velocità operative sono relativamente basse. |
BETA
Ho
iniziato a studiare un proprotipo più realistico in accordo con
le esigenze dell'azienza. Subito dopo la versione ALPHA,
ho concepito una macchina più ragionevole: la versione BETA
(2005). Per quanto riguarda le prospettive progettuali,
non ci sono molte cose da dire nel caso di questa versione in quanto non
avevo alcuna libertà di azione nelle modifiche strutturali telaio
originale.
La versione BETA presentava gia dall'inizio
alcuni problemi architettonici, principalmente dovuti dalla posizione
di entrambe le turbine che come si vede dalla foto erano sistemate in
origine rispettivamente ai lati, ed al di sopra del piano del pilota.
Questo è fonte di alcune difficoltà nel progetto, come l'accesso
limitativo del pilota all'interno dell'abitacolo e ne impedisce l'evaquazione
in caso di emergenza
 |
|
 |
|
 |
|
 |
|
UN sistema di stabilizazione aerodinamico super leggero risulta necessario anche per la bassa velocità di corciera. Circa i sistemi di controllo, vi è un piccolo pannello con gli indicatori indispensabili per la conduzione della macchina, come una coppia di indicatori di TOT, una coppia di indicatori di RPM, entrambi relativi alle funzioni principali delle turbine, inoltre un doppio contagiri per rotori/trasmissione, ed un indicatore di coppia (TORQUE). Altri indicatori sono relativi allo stato delle batterie, ed alle frequenze radio. Un joystick che controlla sia la potenza che l'imbardata, contiene sulla testa una coppia di interruttori per l'avviamento; una coppia per lo spegnimento; ed una coppia per il trimmaggio dei motori. Il controllo della direzione invece non avviene più come nel modello ALFA ma agendo direttamente su di un sistema di ripartizione collettiva dei due rotori simile al dispositivo utilizzato sugli elicotteri KAMOV, infine sul lato sinistro una semplice maniglia garantisce l'appiglio durante il volo.
DELTA
Nella versione Delta (2005) la missione è stata più semplice perchè avevo piena libertà progettuale, così ho iniziato ad apporre quelle modifiche che ritenevo essenziali per migliorare le caratteristiche funzionali della macchina. Per prima cosa ho ruotato entrambi i motori di 90° portandoli sull’asse longitudinale, abbassandoli successivamente al di sotto del piano del pilota. In questo modo le turbine sono collegate direttamente alla trasmissione attraverso la frizione centrifuga, eliminando le cinghie della versione BETA.

Ho incontrato non pochi problemi per poter posizionare i motori sull'asse longitudinale, uno dei più importanti era l’estrema vicinanza delle turbine con il rotore superiore che sebbene le pale siano totalmente rigide in caso di forte flappeggio di una sola pala, sarebbero state colpite con danni piuttosto seri, sia al motore sia all’intera piattaforma, cosi ho allungato leggermente l’altezza dei pattini e la lunghezza dell’albero rotore.


In
conseguenza di queste modifiche entrambi i serbatoi sono stati posizionati
lateralmente, rispettivamente su ogni lato, per il riempimento basterà
alzare il coperchio laterale rivestito. In questo modo i serbatoi risultano
completamente nascosti ed isolati dall’esterno. Il tutto è
coperto da una elegante piattaforma a profilo alare capace di contenere
apparecchiature e sistemi vitali per il funzionamento della macchina
stessa, ulteriore spazio risulta disponibile all’interno dei due
vani motore, che includono anche le due batterie di servizio.
La versione Delta allo stesso modo delle precedentei
è a sua volta coperta da una cintura ed una fascia pneumatica
in modo da isolare l’area delle pale da collisioni esterne, sopratutto
per garantire la sicurezza al personale al suolo. Questo espediente
è altrettanto importante anche in caso di incidente perché
il rotore rimarrebbe confinato all’interno di questa gabbia con
un minimo rischio per il pilota. Questa versione cosi come la ALPHA
è munita di una griglia protettiva, più leggera ma ugualmente
efficiente.
L’innovazione nel progetto è lo "sgabello” di
ancoraggio. Dato che il pilota deve mantenere la posizione eretta in
un punto stabile , muovendo solo il busto in modo da modificare la traiettoria
della macchina semplicemente inclinandosi nella direzione desiderata,
producendo come conseguenza un momento che sbilancia la piattaforma
in quella data direzione ,risulta necessario trovare un punto di ancoraggio
di sicurezza. Per poter assolvere a questo problema ho disegnato questo
dispositivo provvisto di superfici di supporto morbide, come cuscini
lombari, oltre che di tre gruppi di cinture che possono essere efficacemente
allacciate al corpo. Tuttavia il dispositivo possiede una libertà
di movimento che consente al pilota di interagire liberamente con l’assetto
desiderato. Lo sgabello è ancorato alla piattaforma mediante
una robusta molla a spirale che lo mantiene spontaneamente diritto in
posizione di riposo.


Una
delle applicazioni più interessanti potenzialmente commerciali
impiegabili ad uso civile è certamente la versione antincendio.
Questa nella foto è denominata come DELTAF2
ed è sostanzialmente una variazione della versione
DELTA.
Diversamente dalla versione base essa è provvista di carrelli
di atterraggio a quattro ruote in grado di spostare la piattaforma al
suoloautonomamente mediante dei motori elettrici applicati alle ruote
stesse come quelle dei CELL CRAFT©.
Questa
macchina è leggermente più alta della Delta base,
ed i cannoni ad acqua possono essere controllati attraverso un dispositivo
all’interno del cockpit posto sul lato sinistro del pannello.
Ho trovato numerosi sistemi facilmente impiegabili a bordo di aeromobili
come la DELTA , vi è una vasta varietà
di cannoni ad impulso ad alta pressione disponibili. Grazie alle ruote
è possibile muovere la piattaforma al suolo per il rifornimento
di sostanze schiumose o di acqua in relazione alle circostanze.

I compressori sono alimentati da un generatore ausiliario che produce l’energia necessaria a far funzionare i cannoni. Questi due elementi possono essere posizionati al di sotto della piattaforma e perfino utilizzare il vano motore. In proposito ho prodotto un paio di immagini per meglio dimostrare l’utilità di un tale aeromobile. Il potenziale della DELTAF2 come velivolo della PAM GROUP è senza dubbio una straordinaria idea.
Si pensi agli elicotteri, nessuna macchina sarebbe in grado di avvicinarsi cosi tanto ad un edificio per soffocare un incendio. Immagino una piattaforma in servizio nei maggiori aeroporti, che sia pilotata o radio controolata a distanza in servizio nei porti, ma anche sulle piattaforme petrolifere ed in altri mille impieghi.
Delta SF è la versione marina della piattaforma volante equipaggiata con due galleggianti, molto versatile e facilmente impiegabile in non meno importanti compiti come quelli indirizzati al servizio di GUARDIA COSTIERA o alla sorveglianza d'aree marine.


Il velivolo è davvero versatile, è capace di raggiungere qualsiasi imbarcazione non troppo lontana dalla linea costiera sia per operazioni di controllo che di salvataggio. Questa versione deriva in sostanza dalla base DELTA, ed entrambi i galleggianti possono essere sostituiti semplicemente rimuovendo i due bulloni sul connettore dello scarpone. I galleggianti sono costruiti in gomma nera appositamente trattata per condizioni marine, inoltre l'area galleggiante è protetta da un guscio in plastica a sua volta provvisto di pedana metallica che protegge il pneumatico dall'usura. In fine tutta la struttura galleggiante non supera in totale i 40 kg di peso. Vi sono diverse versioni di questo velivolo una di esse disponibile con porte laterali trasparenti per applicazioni in climi freddi e sostegni esterni per accogliere altri due componenti di equipaggio per impieghi civili come le emergenze sul territorio. Suggeriamo una versione "dottori volanti" in cui un equipaggio medico di soccorso sia in grado di raggiungere in breve tempo aree a bassa accessibilità per prestare i primi soccorsi a pazienti che necessitino di immediato aiuto.
Questa versione della piattaforma può essere impiegata con successo anche come mezzo operativo o di osservazione a bordo di imbarcazioni o di piattaforme off-shore a costo contenuto facendo la differenza tra il movimento marino e aereo.
La versione Delta SK è un progetto unico nel suo genere ed è stata disegnata unicamente per condizioni climatiche in cui le temperature sono spesso sotto lo 0° C, essa potrebbe essere largamente e con successo essere impiegata in questo tipo di ambienti ostili dove un velivolo di questo tipo potrà essere di particolare utilità per applicazioni civili e di assistenza.
La mia attenzione è rivolta a quei paesi come la Finlandia ad esempio dove la natura del territorio cosi come il clima mantiene la maggior parte degli abitanti isolati specie nella stagione invernale dal resto delle comunità per lunghi periodi, infatti le principali vie di comunicazione sono completamente coperte da neve e ghiaccio che riducono le possibilità di trasporto e collegamento a volte rendendo impossibile anche piccoli spostamenti. Il territorio Finlandese offre un interessante prospettiva per questi velivoli, vi sono vaste pianure e valli ad una accettabile altitudine adatte alle prestazioni della macchina che non è progettata per alte quote ma solo per scavalcare ostacoli aerei a muoversi in prossimità del suolo.


L’aeromobile si comporta come una moto volante e dunque l’indirizzo ad operazioni mediche di emergenza sarebbe l’eccellenza per un perfetto impiego delle proprietà del velivolo che potremmo battezzare “MEDICO VOLANTE”.

Per poter adattare l’aeromobile ad un tale compito alcune modifiche sono state necessarie rispetto alla versione DELTA originale, la più evidente è senza dubbio il sistema di atterraggio che si adatta al manto nevoso permettendo un sicuro ancoraggio e stabilità al suolo.
Il pilota deve essere protetto dalle basse temperature esterne dalla neve dal ghiaccio e dalla pioggia gelida, per questo si sono aggiunte due portiere laterali trasparenti ed un sistema di termoregolazione interna.
All’esterno quattro contenitori rigidi termo-isolati conterrebbero la strumentazione di assistenza medica i medicinali e tutto il necessario per intereventi di emergenza perfino intensivi per tutte quelle circostanze anche imprevedibili inclusa l’assistenza a distanza.
Dato che che il livello di luce solare è piuttosto basso a queste latitudini alcune luci esterne devono essere aggiunte sul lato anteriore della cabina , cosi pure modificare le luci di posizione con un raggio di visibilità più ampio, in tal modo l’aeromobile sarebbe chiaramente visibile in qualunque condizione, il color fiamma del velivolo sarà chiaramente visibile anche a notevole distanza.
Alcuni
aspetti importanti della piattaforma disengata per la PAM
richiedono una ulteriore analisi in modo da rendere completo il mio lavoro
sul progetto almeno in ogni singolo dettaglio che è stato accuratamente
studiato tenendo in considerazione la mia esperienza sia come pilota che
come designer industriale.
Come risulta perfettamente chiaro dal progetto della PAM
e dalle intenzioni dei suoi ingegneri la piattaforma risponde senza problemi
ad un design molto semplice ed essenziale, anzi essi divengono ancora
più evidenti se il progettista considera ogni possibile impiego
o situazione critica in cui l’aeromobile possa essere coinvolto.
Il controllo della potenza che provvedere al sollevamento della macchina attraverso l’azione sui due principali rotori contro-rotanti avviene variando l’angolo di attacco collettivamente delle pale, mentre per poter controllare sia la direzione che la velocità il pilota deve inclinare il busto superiore del corpo nella direzione desiderata producendo un momento che abbia un considerevole effetto sulla stabilità della piattaforma inclinandola nella direzione desiderata ad una data velocità proporzionale al braccio prodotto dall’inclinazione del corpo su di essa.
Per
fare ciò efficacemente il pilota deve contare su tre fondamentali
punti di appoggio da dove muovere il corpo, questi sono i piedi che debbono
essere saldamente ancorati al pavimento, la mano destra e la mano sinistra
anch’esse assicurate alla piattaforma, ma con possibilità
di controllo ed accesso ai comandi di volo come il dispositivo di variazione
della POTENZA o COLLETTIVO
ed il CONTROLLO di DIREZIONE.
Dopo diverse ore di studio e simulazione al computer con analisi approfondite
di ogni prevedibile posizione del pilota in volo, ho disegnato una specie
di maniglia fissa, alla testa della quale vi è una manetta che
per qualche verso ricorda quella di tipo motociclistico anche se la funzione
è molto diversa, poichè essa agisce sul passo colelttivo
dei rotori ed un sistema di gestione dei motori sulla parte superiore.
Il controllo del Collettivo avviene ruotando un senso orario o antiorario a seconda che si voglia incrementare o ridurre l’angolo di attacco delle pale dei due rotori coassali, e quindi variando la spinta che questi producono facendo volare la macchina.
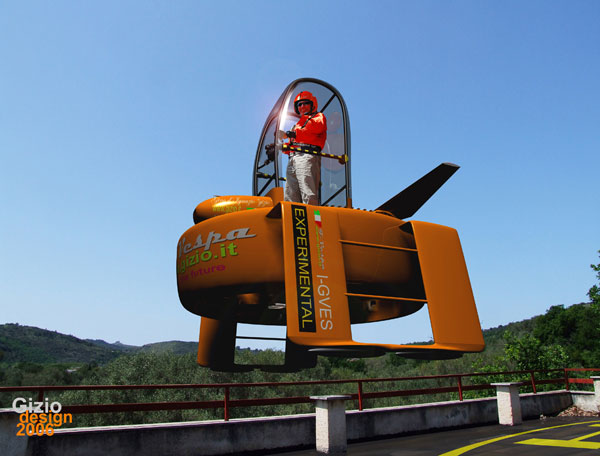
In seguito al progetto PAM sviluppai una versione personale più avanzata basata sullo stesso meccanismo ma con rotore ed architettura più compatte ed un impiego di elettronica e sistemi di sicurezza più avanzati, il progetto fu chiamato F-Vespa dal quale altre due varianti furono ricavate negli anni successivi, di cui una a controllo remoto.
Il
controllo del collettivo sulla F-Vespa avveniva attraverso una piccola
leva che manteneva l'ultima posizione assegnata dal pilota, inoltre inoltre
un sistema di stabilità dinamica consentiva di mantenere la piattaforma
perfettamente sul piano orizzontale utilizzando un posizionatore GPS.
Questa interazione è possibile grazie alle tecnologie digitali
dei servomeccanismi che sono capaci di produrre movimenti ed azioni di
altissima precisione agendo direttamente sui comandi meccanici remoti
come ad esempio il leveraggio del collettivo.
Non sono in gradi di prevedere il futuro per questo tipo di macchine, ma è probabile che in seguito ai miei progetti qualcun'altro verrà stimolato come già è accaduto nel proseguire su questa o altre idee.
©Gino D'Ignazio Gizio